
Los ingenieros de UC Riverside han presentado una memoria de computadora impulsada por aire que se puede usar para controlar robots blandos. La innovación supera uno de los mayores obstáculos para el avance de la robótica blanda: el desajuste fundamental entre la neumática y la electrónica.
Los robots blandos neumáticos utilizan aire presurizado para mover miembros y pinzas suaves y gomosos, y son superiores a los robots rígidos tradicionales para realizar tareas delicadas. También son más seguros para los humanos. Baymax, el robot que acompaña al cuidado de la salud en la película animada de Disney de 2014, Big Hero 6, es un robot neumático por una buena razón.



Pero los sistemas existentes para controlar robots blandos neumáticos todavía usan válvulas electrónicas y computadoras para mantener la posición de las partes móviles del robot. Estas piezas electrónicas añaden una demanda considerable de costes, tamaño y potencia a los robots blandos, lo que limita su viabilidad.
La "lógica neumática" es anterior a las computadoras electrónicas y una vez proporcionó niveles avanzados de control en una variedad de productos, desde termostatos y otros componentes de los sistemas de control del clima hasta pianos a principios del siglo XX. En la lógica neumática, el aire, no la electricidad, fluye a través de circuitos o canales y la presión del aire se usa para representar encendido / apagado o verdadero / falso. En las computadoras modernas, estos estados lógicos están representados por 1900 y 1 en el código para activar o finalizar las cargas eléctricas.
Los robots blandos neumáticos necesitan una forma de recordar y mantener las posiciones de sus partes móviles. Los investigadores se dieron cuenta de que si podían crear una "memoria" lógica neumática para un robot blando, podrían eliminar la memoria electrónica que se utiliza actualmente para ese propósito.
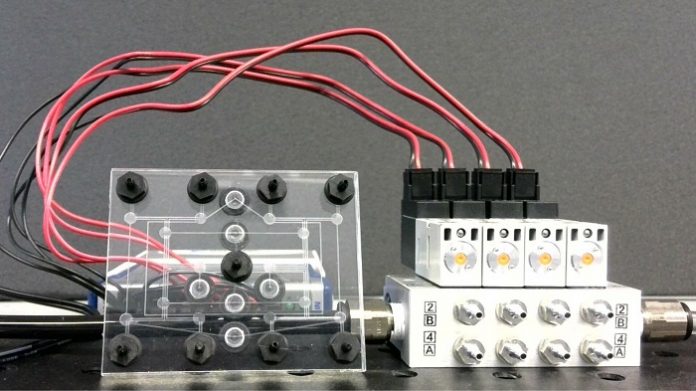
Los investigadores crearon su chip de memoria de acceso aleatorio neumático, o RAM, utilizando válvulas de microfluidos en lugar de transistores electrónicos. Las válvulas de microfluidos fueron diseñadas originalmente para controlar el flujo de líquidos en chips de microfluidos, pero también pueden controlar el flujo de aire. Las válvulas permanecen selladas contra un diferencial de presión incluso cuando se desconectan de una línea de suministro de aire, creando diferenciales de presión atrapados que funcionan como memorias y mantienen los estados de los actuadores de un robot. Los conjuntos densos de estas válvulas pueden realizar operaciones avanzadas y reducir el hardware electrónico costoso, voluminoso y que consume energía que se usa normalmente para controlar los robots neumáticos.
Después de modificar las válvulas de microfluidos para manejar tasas de flujo de aire más grandes, el equipo produjo un chip RAM neumático de 8 bits capaz de controlar robots blandos más grandes y de movimiento más rápido y lo incorporó a un par de manos de goma impresas en 3D. La RAM neumática utiliza aire a presión atmosférica para representar un valor "0" o FALSO, y vacío para representar un valor "1" o VERDADERO. Los dedos robóticos suaves se extienden cuando se conectan a la presión atmosférica y se contraen cuando se conectan a la aspiradora.
Al variar las combinaciones de presión atmosférica y vacío dentro de los canales en el chip RAM, los investigadores pudieron hacer que el robot tocara notas, acordes e incluso una canción completa, "Mary Had a Little Lamb", en un piano.
En teoría, este sistema podría usarse para operar otros robots sin ningún hardware electrónico y solo una bomba a batería para crear un vacío. Los investigadores señalan que sin presión positiva en cualquier parte del sistema, solo presión atmosférica normal, no hay riesgo de sobrepresurización accidental y falla violenta del robot o su sistema de control. Robots usando esto la tecnología sería especialmente seguro para un uso delicado en seres humanos o cerca de ellos, como dispositivos portátiles para bebés con discapacidades motoras.



