
Ingenieurs van UC Riverside hebben een door lucht aangedreven computergeheugen onthuld dat kan worden gebruikt om zachte robots te besturen. De innovatie overwint een van de grootste obstakels voor de opmars van zachte robotica: de fundamentele mismatch tussen pneumatiek en elektronica.
Pneumatische zachte robots gebruiken perslucht om zachte, rubberachtige ledematen en grijpers te bewegen en zijn superieur aan traditionele starre robots voor het uitvoeren van delicate taken. Ze zijn ook veiliger voor mensen om in de buurt te zijn. Baymax, de zorgrobot in de animatiefilm van Disney uit 2014, Big Hero 6, is niet voor niets een pneumatische robot.



Maar bestaande systemen voor het aansturen van pneumatische zachte robots gebruiken nog steeds elektronische kleppen en computers om de positie van de bewegende delen van de robot te handhaven. Deze elektronische onderdelen voegen aanzienlijke kosten, afmetingen en vermogens toe aan zachte robots, waardoor hun haalbaarheid wordt beperkt.
"Pneumatische logica" dateert van vóór elektronische computers en bood ooit geavanceerde controleniveaus in een verscheidenheid aan producten, van thermostaten en andere componenten van klimaatbeheersingssystemen tot pianola's in de vroege jaren 1900. In pneumatische logica stroomt lucht, niet elektriciteit, door circuits of kanalen en wordt luchtdruk gebruikt om aan/uit of waar/onwaar weer te geven. In moderne computers worden deze logische toestanden weergegeven door 1 en 0 in code om elektrische ladingen te activeren of te beëindigen.
Pneumatische zachte robots hebben een manier nodig om de posities van hun bewegende delen te onthouden en te behouden. De onderzoekers realiseerden zich dat als ze een pneumatisch logisch "geheugen" voor een zachte robot konden creëren, ze het elektronische geheugen dat momenteel voor dat doel wordt gebruikt, zouden kunnen elimineren.
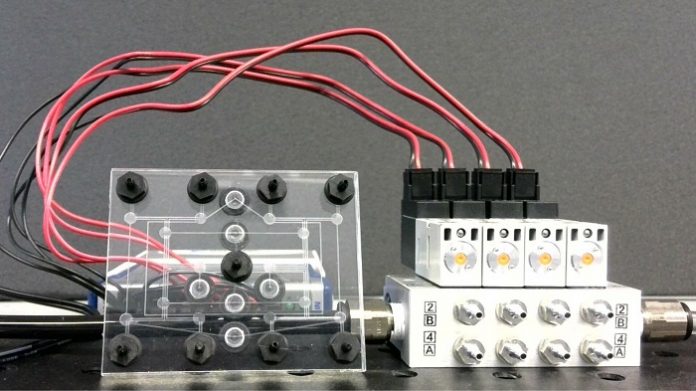
De onderzoekers maakten hun pneumatische random-access memory, of RAM, chip met behulp van microfluïdische kleppen in plaats van elektronische transistors. De microfluïdische kleppen zijn oorspronkelijk ontworpen om de vloeistofstroom op microfluïdische chips te regelen, maar ze kunnen ook de luchtstroom regelen. De kleppen blijven afgedicht tegen een drukverschil, zelfs wanneer ze zijn losgekoppeld van een luchttoevoerleiding, waardoor opgesloten drukverschillen ontstaan die als geheugen fungeren en de toestanden van de actuatoren van een robot behouden. Dichte reeksen van deze kleppen kunnen geavanceerde bewerkingen uitvoeren en de dure, omvangrijke en energieverslindende elektronische hardware verminderen die doorgaans wordt gebruikt om pneumatische robots te besturen.
Na het aanpassen van de microfluïdische kleppen om grotere luchtstroomsnelheden aan te kunnen, produceerde het team een 8-bit pneumatische RAM-chip die grotere en sneller bewegende zachte robots kan besturen en verwerkte deze in een paar 3D-geprinte rubberen handen. De pneumatische RAM gebruikt lucht onder atmosferische druk om een "0" of FALSE-waarde weer te geven, en vacuüm om een "1" of TRUE-waarde weer te geven. De zachte robotvingers worden gestrekt bij aansluiting op atmosferische druk en samengetrokken bij aansluiting op het vacuüm.
Door de combinaties van atmosferische druk en vacuüm binnen de kanalen op de RAM-chip te variëren, konden de onderzoekers de robot noten, akkoorden en zelfs een heel nummer - "Mary Had a Little Lamb" - op een piano laten spelen.
In theorie zou dit systeem kunnen worden gebruikt om andere robots te bedienen zonder elektronische hardware en alleen een pomp op batterijen om een vacuüm te creëren. De onderzoekers merken op dat zonder positieve druk ergens in het systeem - alleen normale atmosferische luchtdruk - er geen risico is op onbedoelde overdruk en gewelddadige uitval van de robot of het besturingssysteem. Robots die dit gebruiken technologie zou vooral veilig zijn voor delicaat gebruik op of rond mensen, zoals draagbare apparaten voor baby's met motorische beperkingen.



