
Les ingénieurs de l'UC Riverside ont dévoilé une mémoire informatique pneumatique qui peut être utilisée pour contrôler des robots logiciels. L'innovation surmonte l'un des plus grands obstacles à l'avancement de la robotique douce : l'inadéquation fondamentale entre la pneumatique et l'électronique.
Les robots souples pneumatiques utilisent de l'air sous pression pour déplacer les membres et les pinces mous et caoutchouteux et sont supérieurs aux robots rigides traditionnels pour effectuer des tâches délicates. Ils sont également plus sûrs pour les humains. Baymax, le robot compagnon de soins du film d'animation Disney de 2014, Big Hero 6, est un robot pneumatique pour une bonne raison.



Mais les systèmes existants de contrôle des robots pneumatiques souples utilisent toujours des valves électroniques et des ordinateurs pour maintenir la position des pièces mobiles du robot. Ces pièces électroniques ajoutent un coût, une taille et des demandes de puissance considérables aux robots mous, limitant leur faisabilité.
La « logique pneumatique » est antérieure aux ordinateurs électroniques et fournissait autrefois des niveaux de contrôle avancés dans une variété de produits, des thermostats et autres composants des systèmes de climatisation aux pianos mécaniques au début des années 1900. Dans la logique pneumatique, l'air, et non l'électricité, circule à travers des circuits ou des canaux et la pression d'air est utilisée pour représenter tout ou rien ou vrai/faux. Dans les ordinateurs modernes, ces états logiques sont représentés par 1 et 0 dans le code pour déclencher ou mettre fin aux charges électriques.
Les robots pneumatiques souples ont besoin d'un moyen de se souvenir et de maintenir les positions de leurs pièces mobiles. Les chercheurs ont réalisé que s'ils pouvaient créer une « mémoire » logique pneumatique pour un robot logiciel, ils pourraient éliminer la mémoire électronique actuellement utilisée à cette fin.
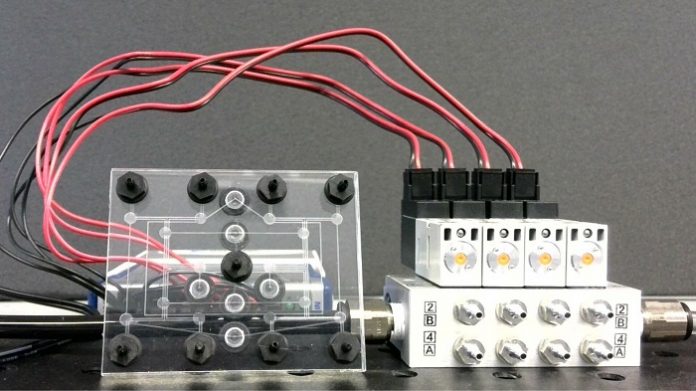
Les chercheurs ont fabriqué leur mémoire pneumatique à accès aléatoire, ou RAM, en utilisant des valves microfluidiques au lieu de transistors électroniques. Les vannes microfluidiques ont été conçues à l'origine pour contrôler le débit de liquides sur les puces microfluidiques, mais elles peuvent également contrôler le débit d'air. Les vannes restent scellées contre un différentiel de pression même lorsqu'elles sont déconnectées d'une conduite d'alimentation en air, créant des différentiels de pression piégés qui fonctionnent comme des mémoires et maintiennent les états des actionneurs d'un robot. Des réseaux denses de ces vannes peuvent effectuer des opérations avancées et réduire le matériel électronique coûteux, encombrant et énergivore généralement utilisé pour contrôler les robots pneumatiques.
Après avoir modifié les valves microfluidiques pour gérer des débits d'air plus importants, l'équipe a produit une puce RAM pneumatique 8 bits capable de contrôler des robots souples plus grands et plus rapides et l'a incorporée dans une paire de mains en caoutchouc imprimées en 3D. Le RAM pneumatique utilise de l'air à pression atmosphérique pour représenter une valeur « 0 » ou FAUX, et le vide pour représenter une valeur « 1 » ou VRAI. Les doigts robotiques souples sont étendus lorsqu'ils sont connectés à la pression atmosphérique et contractés lorsqu'ils sont connectés au vide.
En faisant varier les combinaisons de pression atmosphérique et de vide dans les canaux de la puce RAM, les chercheurs ont pu faire jouer au robot des notes, des accords et même une chanson entière - "Mary Had a Little Lamb" - sur un piano.
En théorie, ce système pourrait être utilisé pour faire fonctionner d'autres robots sans aucun matériel électronique et uniquement une pompe alimentée par batterie pour créer un vide. Les chercheurs notent que sans pression positive n'importe où dans le système - uniquement la pression atmosphérique normale - il n'y a aucun risque de surpression accidentelle et de défaillance violente du robot ou de son système de contrôle. Robots utilisant ce sans souci serait particulièrement sûr pour une utilisation délicate sur ou autour des humains, tels que les dispositifs portables pour les nourrissons ayant une déficience motrice.



