
Engenheiros da UC Riverside revelaram uma memória de computador movida a ar que pode ser usada para controlar robôs soft. A inovação supera um dos maiores obstáculos para o avanço da robótica leve: a incompatibilidade fundamental entre pneumática e eletrônica.
Robôs macios pneumáticos usam ar pressurizado para mover membros e garras macios e emborrachados e são superiores aos robôs rígidos tradicionais para realizar tarefas delicadas. Eles também são mais seguros para os humanos estarem por perto. Baymax, o robô companheiro de saúde no filme de animação da Disney de 2014, Big Hero 6, é um robô pneumático por um bom motivo.



Mas os sistemas existentes para controlar robôs flexíveis pneumáticos ainda usam válvulas eletrônicas e computadores para manter a posição das partes móveis do robô. Essas peças eletrônicas agregam custo, tamanho e demandas de potência consideráveis aos robôs soft, limitando sua viabilidade.
A “lógica pneumática” antecede os computadores eletrônicos e já fornecia níveis avançados de controle em uma variedade de produtos, desde termostatos e outros componentes de sistemas de controle de temperatura a pianos no início do século XX. Na lógica pneumática, o ar, não a eletricidade, flui através de circuitos ou canais e a pressão do ar é usada para representar liga / desliga ou verdadeiro / falso. Em computadores modernos, esses estados lógicos são representados por 1900 e 1 no código para disparar ou encerrar as cargas elétricas.
Os robôs flexíveis pneumáticos precisam de uma maneira de lembrar e manter as posições de suas partes móveis. Os pesquisadores perceberam que se pudessem criar uma “memória” lógica pneumática para um robô soft, eles poderiam eliminar a memória eletrônica usada atualmente para esse propósito.
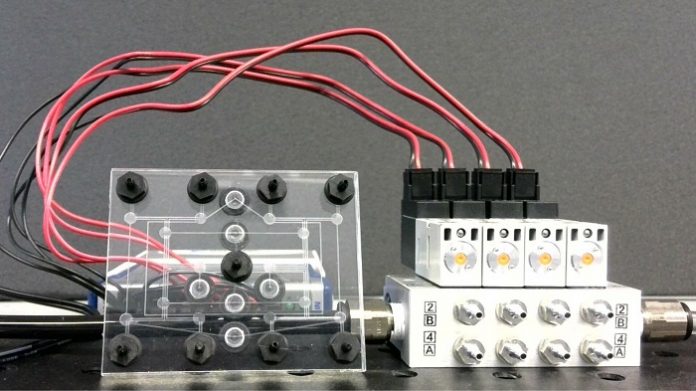
Os pesquisadores fizeram seu chip de memória de acesso aleatório pneumático, ou RAM, usando válvulas microfluídicas em vez de transistores eletrônicos. As válvulas microfluídicas foram originalmente projetadas para controlar o fluxo de líquidos em chips microfluídicos, mas também podem controlar o fluxo de ar. As válvulas permanecem vedadas contra um diferencial de pressão mesmo quando desconectadas de uma linha de suprimento de ar, criando diferenciais de pressão presos que funcionam como memórias e mantêm os estados dos atuadores de um robô. Matrizes densas dessas válvulas podem executar operações avançadas e reduzir o hardware eletrônico caro, volumoso e consumidor de energia normalmente usado para controlar robôs pneumáticos.
Depois de modificar as válvulas microfluídicas para lidar com taxas de fluxo de ar maiores, a equipe produziu um chip RAM pneumático de 8 bits capaz de controlar robôs macios maiores e mais rápidos e incorporou-o a um par de mãos de borracha impressas em 3D. O RAM pneumático usa ar de pressão atmosférica para representar um valor “0” ou FALSO, e vácuo para representar um valor “1” ou VERDADEIRO. Os dedos robóticos macios são estendidos quando conectados à pressão atmosférica e contraídos quando conectados ao vácuo.
Variando as combinações de pressão atmosférica e vácuo nos canais do chip RAM, os pesquisadores conseguiram fazer o robô tocar notas, acordes e até uma música inteira - “Mary Had a Little Lamb” - em um piano.
Em teoria, esse sistema poderia ser usado para operar outros robôs sem nenhum hardware eletrônico e apenas uma bomba movida a bateria para criar um vácuo. Os pesquisadores observam que sem pressão positiva em qualquer lugar do sistema - apenas a pressão atmosférica normal do ar - não há risco de sobrepressurização acidental e falha violenta do robô ou seu sistema de controle. Robôs usando isso tecnologia seria especialmente seguro para uso delicado em ou perto de seres humanos, como dispositivos vestíveis para bebês com deficiências motoras.



