
Инженеры UC Riverside представили компьютерную память с пневматическим приводом, которую можно использовать для управления мягкими роботами. Нововведение преодолевает одно из самых больших препятствий на пути развития мягкой робототехники: фундаментальное несоответствие между пневматикой и электроникой.
Пневматические мягкие роботы используют сжатый воздух для перемещения мягких, эластичных конечностей и захватов и превосходят традиционные жесткие роботы для выполнения деликатных задач. Они также безопаснее для людей. Баймакс, робот-компаньон из мультфильма Диснея 2014 года «Большой герой 6», является пневматическим роботом не зря.



Но существующие системы для управления мягкими пневматическими роботами по-прежнему используют электронные клапаны и компьютеры для поддержания положения движущихся частей робота. Эти электронные компоненты значительно увеличивают стоимость, размер и мощность мягких роботов, что ограничивает их возможности.
«Пневматическая логика» предшествовала электронным компьютерам и когда-то обеспечивала продвинутый уровень управления в самых разных продуктах, от термостатов и других компонентов систем климат-контроля до пианино в начале 1900-х годов. В пневматической логике воздух, а не электричество, проходит через цепи или каналы, а давление воздуха используется для обозначения включения / выключения или истины / ложности. В современных компьютерах эти логические состояния представлены кодами 1 и 0 для запуска или прекращения электрических зарядов.
Пневматическим мягким роботам нужен способ запоминать и поддерживать положение своих движущихся частей. Исследователи поняли, что если бы они могли создать пневматическую логическую «память» для мягкого робота, они могли бы устранить электронную память, используемую в настоящее время для этой цели.
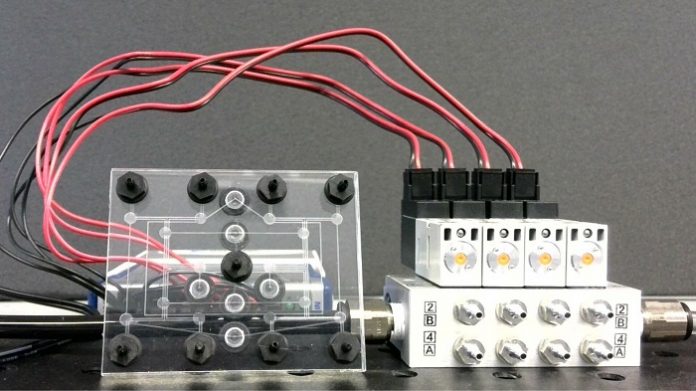
Исследователи создали свою микросхему пневматической оперативной памяти, или ОЗУ, с использованием микрофлюидных клапанов вместо электронных транзисторов. Микрожидкостные клапаны изначально были разработаны для управления потоком жидкости на микрожидкостных чипах, но они также могут управлять потоком воздуха. Клапаны остаются закрытыми от перепада давления даже при отключении от линии подачи воздуха, создавая задержанные перепады давления, которые функционируют как память и поддерживают состояния исполнительных механизмов робота. Плотные массивы этих клапанов могут выполнять сложные операции и сокращать использование дорогостоящего, громоздкого и энергоемкого электронного оборудования, обычно используемого для управления пневматическими роботами.
После модификации микрожидкостных клапанов для работы с большей скоростью воздушного потока команда создала 8-битный чип пневматической RAM, способный управлять более крупными и быстро движущимися мягкими роботами, и включил его в пару резиновых рук, напечатанных на 3D-принтере. Пневматическое ОЗУ использует воздух атмосферного давления для представления значения «0» или ЛОЖЬ и вакуум для представления значения «1» или ИСТИНА. Мягкие пальцы робота выдвигаются при атмосферном давлении и сжимаются при подключении к вакууму.
Варьируя комбинации атмосферного давления и вакуума в каналах на чипе RAM, исследователи смогли заставить робота воспроизводить ноты, аккорды и даже целую песню - «Mary Had a Little Lamb» - на пианино.
Теоретически эту систему можно использовать для управления другими роботами без какого-либо электронного оборудования и только с аккумуляторным насосом для создания вакуума. Исследователи отмечают, что без положительного давления где-либо в системе - только при нормальном атмосферном давлении - нет риска случайного повышения давления и серьезного отказа робота или его системы управления. Роботы, использующие это technology были бы особенно безопасны для деликатного использования на людях или рядом с ними, например, в носимых устройствах для младенцев с двигательными нарушениями.



