
Các kỹ sư tại UC Riverside vừa công bố bộ nhớ máy tính chạy bằng không khí có thể được sử dụng để điều khiển robot mềm. Sự đổi mới này đã khắc phục được một trong những trở ngại lớn nhất trong việc phát triển robot mềm: sự không phù hợp cơ bản giữa khí nén và thiết bị điện tử.
Robot mềm bằng khí nén sử dụng không khí có áp suất để di chuyển các chi và dụng cụ kẹp mềm, bằng cao su, đồng thời vượt trội hơn so với các robot cứng truyền thống trong việc thực hiện các nhiệm vụ tinh vi. Chúng cũng an toàn hơn cho con người khi ở gần. Baymax, robot đồng hành chăm sóc sức khỏe trong bộ phim hoạt hình Disney năm 2014, Big Hero 6, là một robot khí nén vì lý do chính đáng.



Nhưng các hệ thống điều khiển robot mềm bằng khí nén hiện nay vẫn sử dụng van điện tử và máy tính để duy trì vị trí các bộ phận chuyển động của robot. Những bộ phận điện tử này làm tăng thêm nhu cầu về chi phí, kích thước và năng lượng đáng kể cho robot mềm, hạn chế tính khả thi của chúng.
“Logic khí nén” có trước máy tính điện tử và từng cung cấp mức độ điều khiển tiên tiến trong nhiều loại sản phẩm, từ bộ điều nhiệt và các bộ phận khác của hệ thống kiểm soát khí hậu cho đến đàn piano chơi nhạc vào đầu những năm 1900. Trong logic khí nén, không khí, không phải điện, chạy qua các mạch hoặc kênh và áp suất không khí được sử dụng để biểu thị bật/tắt hoặc đúng/sai. Trong các máy tính hiện đại, các trạng thái logic này được biểu thị bằng mã 1 và 0 để kích hoạt hoặc kết thúc quá trình sạc điện.
Robot mềm khí nén cần có cách ghi nhớ và duy trì vị trí của các bộ phận chuyển động. Các nhà nghiên cứu nhận ra rằng nếu họ có thể tạo ra “bộ nhớ” logic khí nén cho robot mềm thì họ có thể loại bỏ bộ nhớ điện tử hiện đang được sử dụng cho mục đích đó.
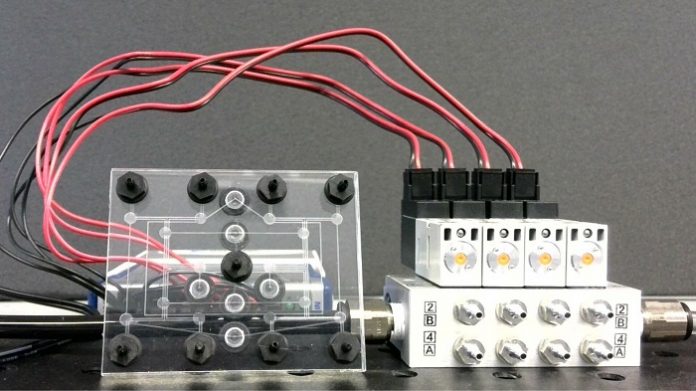
Các nhà nghiên cứu đã tạo ra chip bộ nhớ truy cập ngẫu nhiên bằng khí nén, hay RAM, sử dụng van vi lỏng thay vì bóng bán dẫn điện tử. Các van vi lỏng ban đầu được thiết kế để kiểm soát dòng chất lỏng trên chip vi lỏng, nhưng chúng cũng có thể kiểm soát luồng không khí. Các van vẫn được bịt kín để tránh chênh lệch áp suất ngay cả khi ngắt kết nối khỏi đường cấp khí, tạo ra chênh lệch áp suất bị mắc kẹt có chức năng như bộ nhớ và duy trì trạng thái của bộ truyền động của robot. Các mảng dày đặc của các van này có thể thực hiện các hoạt động nâng cao và giảm bớt phần cứng điện tử đắt tiền, cồng kềnh và tiêu tốn nhiều năng lượng thường được sử dụng để điều khiển rô-bốt khí nén.
Sau khi sửa đổi các van vi lỏng để xử lý tốc độ luồng khí lớn hơn, nhóm nghiên cứu đã tạo ra chip RAM khí nén 8 bit có thể điều khiển các robot mềm lớn hơn và chuyển động nhanh hơn và kết hợp nó vào một đôi tay cao su in 3D. RAM khí nén sử dụng không khí có áp suất khí quyển để biểu thị giá trị “0” hoặc FALSE và chân không để biểu thị giá trị “1” hoặc TRUE. Các ngón tay robot mềm sẽ giãn ra khi tiếp xúc với áp suất khí quyển và co lại khi kết nối với chân không.
Bằng cách thay đổi sự kết hợp giữa áp suất khí quyển và chân không trong các kênh trên chip RAM, các nhà nghiên cứu có thể khiến robot chơi các nốt, hợp âm và thậm chí cả một bài hát—”Mary Had a Little Lamb”—trên một cây đàn piano.
Về lý thuyết, hệ thống này có thể được sử dụng để vận hành các robot khác mà không cần bất kỳ phần cứng điện tử nào và chỉ có một máy bơm chạy bằng pin để tạo chân không. Các nhà nghiên cứu lưu ý rằng nếu không có áp suất dương ở bất kỳ đâu trong hệ thống – chỉ có áp suất không khí trong khí quyển bình thường – thì sẽ không có nguy cơ vô tình tăng áp suất quá mức và hỏng hóc nặng nề cho robot hoặc hệ thống điều khiển của nó. Robot sử dụng cái này công nghệ sẽ đặc biệt an toàn cho việc sử dụng tinh vi trên hoặc xung quanh người, chẳng hạn như thiết bị đeo được cho trẻ sơ sinh bị khuyết tật vận động.



