
UC Riverside'daki mühendisler, yumuşak robotları kontrol etmek için kullanılabilecek, havayla çalışan bir bilgisayar belleğini tanıttı. Bu yenilik, yumuşak robot teknolojisinin ilerlemesinin önündeki en büyük engellerden birinin üstesinden geliyor: pnömatik ve elektronik arasındaki temel uyumsuzluk.
Pnömatik yumuşak robotlar, yumuşak, lastiksi uzuvları ve kavrayıcıları hareket ettirmek için basınçlı hava kullanır ve hassas görevlerin yerine getirilmesinde geleneksel sert robotlardan daha üstündür. Ayrıca insanların etrafta olması daha güvenlidir. 2014 yapımı Disney filmi Big Hero 6'daki sağlık hizmeti yardımcı robotu Baymax'ın pnömatik bir robot olmasının iyi bir nedeni var.



Ancak pnömatik yumuşak robotları kontrol etmeye yönelik mevcut sistemler, robotun hareketli parçalarının konumunu korumak için hâlâ elektronik valfler ve bilgisayarlar kullanıyor. Bu elektronik parçalar, yumuşak robotlara önemli miktarda maliyet, boyut ve güç talebi ekleyerek fizibilitelerini sınırlıyor.
"Pnömatik mantık", elektronik bilgisayarlardan önce ortaya çıktı ve 1900'lerin başında termostatlar ve iklim kontrol sistemlerinin diğer bileşenlerinden oyuncu piyanolarına kadar çeşitli ürünlerde ileri düzeyde kontrol sağladı. Pnömatik mantıkta, devreler veya kanallar boyunca elektrik değil hava akar ve açık/kapalı veya doğru/yanlışı temsil etmek için hava basıncı kullanılır. Modern bilgisayarlarda, elektrik yüklerini tetiklemek veya sonlandırmak için bu mantıksal durumlar kodda 1 ve 0 ile temsil edilir.
Pnömatik yumuşak robotların, hareketli parçalarının konumlarını hatırlayacak ve koruyacak bir yola ihtiyacı vardır. Araştırmacılar, yumuşak bir robot için pnömatik mantık "belleği" oluşturabilirlerse, halihazırda bu amaç için kullanılan elektronik belleği ortadan kaldırabileceklerini fark ettiler.
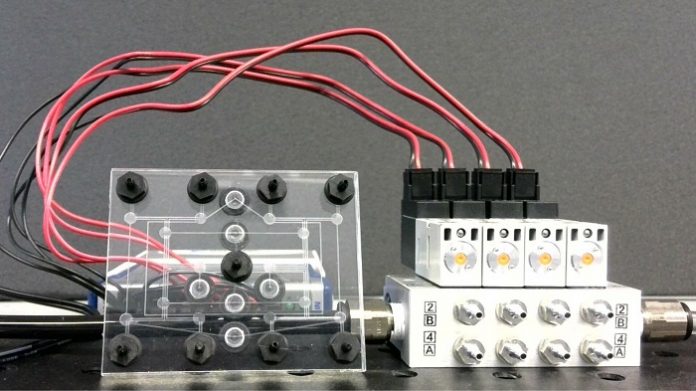
Araştırmacılar pnömatik rastgele erişimli belleklerini veya RAM çiplerini elektronik transistörler yerine mikroakışkan valfler kullanarak yaptılar. Mikroakışkan valfler, başlangıçta mikroakışkan çipler üzerindeki sıvı akışını kontrol etmek için tasarlandı, ancak aynı zamanda hava akışını da kontrol edebilirler. Valfler, hava besleme hattıyla bağlantısı kesildiğinde bile bir basınç farkına karşı kapalı kalır, hafıza olarak işlev gören ve robotun aktüatörlerinin durumlarını koruyan sıkışmış basınç diferansiyelleri oluşturur. Bu valflerin yoğun dizilimi, gelişmiş işlemleri gerçekleştirebilir ve genellikle pnömatik robotları kontrol etmek için kullanılan pahalı, hantal ve güç tüketen elektronik donanımları azaltabilir.
Mikroakışkan valfleri daha büyük hava akış hızlarını idare edecek şekilde değiştirdikten sonra ekip, daha büyük ve daha hızlı hareket eden yumuşak robotları kontrol edebilen 8 bitlik bir pnömatik RAM çipi üretti ve bunu bir çift 3D baskılı lastik ele dahil etti. Pnömatik RAM, "0" veya YANLIŞ değerini temsil etmek için atmosferik basınçlı havayı ve "1" veya DOĞRU değerini temsil etmek için vakumu kullanır. Yumuşak robotik parmaklar, atmosferik basınca bağlandığında uzar ve vakuma bağlandığında büzülür.
Araştırmacılar, RAM çipindeki kanallar içindeki atmosferik basınç ve vakum kombinasyonlarını değiştirerek, robotun notaları, akorları ve hatta “Mary Had a Little Lamb” adlı şarkıyı piyanoda çalmasını sağlayabildiler.
Teorik olarak bu sistem, herhangi bir elektronik donanım olmadan diğer robotları çalıştırmak ve yalnızca pille çalışan bir pompayla vakum oluşturmak için kullanılabilir. Araştırmacılar, sistemin herhangi bir yerinde pozitif basınç olmadığında (yalnızca normal atmosferik hava basıncı), robotun veya kontrol sisteminin kazara aşırı basınç oluşması veya şiddetli bir şekilde arızalanması riskinin bulunmadığını belirtiyorlar. Bunu kullanan robotlar teknoloji motor bozukluğu olan bebeklere yönelik giyilebilir cihazlar gibi, insanların üzerinde veya çevresinde hassas kullanım için özellikle güvenli olacaktır.



