
カリフォルニア大学リバーサイド校のエンジニアは、ソフトロボットの制御に使用できる空圧式のコンピュータメモリを発表しました。 このイノベーションは、ソフトロボティクスの進歩に対する最大の障害のXNUMXつである、空気圧と電子機器の根本的な不一致を克服します。
空気圧ソフトロボットは、加圧空気を使用して柔らかくゴムのような手足やグリッパーを動かし、繊細なタスクを実行するために従来の剛性ロボットよりも優れています。 彼らはまた、人間が周りにいるのにより安全です。 2014年にアニメ化されたディズニー映画「BigHero6」のヘルスケアコンパニオンロボットであるBaymaxは、正当な理由から空気圧ロボットです。



しかし、空気圧ソフトロボットを制御するための既存のシステムは、依然として電子バルブとコンピューターを使用してロボットの可動部品の位置を維持しています。 これらの電子部品は、ソフトロボットにかなりのコスト、サイズ、および電力需要を追加し、その実現可能性を制限します。
「空気圧ロジック」は電子コンピューターよりも前からあり、1900年代初頭には、サーモスタットやその他の気候制御システムのコンポーネントから自動ピアノまで、さまざまな製品で高度なレベルの制御を提供していました。 空気圧ロジックでは、電気ではなく空気が回路またはチャネルを流れ、空気圧はオン/オフまたは真/偽を表すために使用されます。 最近のコンピューターでは、これらの論理状態は、電荷をトリガーまたは終了するコードで1と0で表されます。
空気圧ソフトロボットには、可動部品の位置を記憶して維持する方法が必要です。 研究者たちは、ソフトロボット用の空気圧ロジック「メモリ」を作成できれば、その目的で現在使用されている電子メモリを排除できることに気づきました。
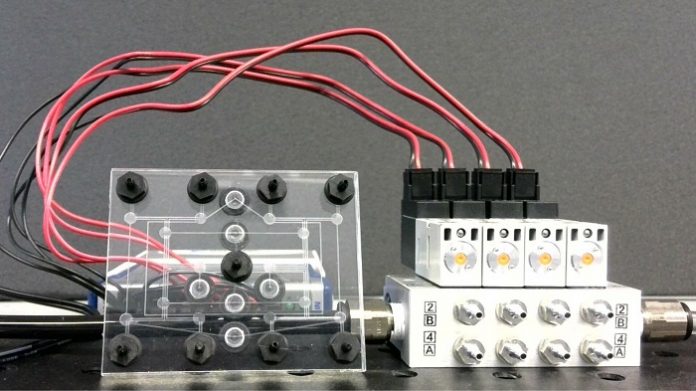
研究者たちは、電子トランジスタの代わりにマイクロ流体バルブを使用して、空気圧ランダムアクセスメモリ(RAM)チップを作成しました。 マイクロ流体バルブは元々、マイクロ流体チップ上の液体の流れを制御するように設計されていましたが、空気の流れを制御することもできます。 バルブは、空気供給ラインから切断された場合でも圧力差に対して密閉されたままであり、メモリとして機能し、ロボットのアクチュエータの状態を維持するトラップされた圧力差を作成します。 これらのバルブの高密度アレイは、高度な操作を実行し、空気圧ロボットの制御に通常使用される、高価で、かさばり、電力を消費する電子ハードウェアを削減できます。
より大きな気流速度を処理するようにマイクロ流体バルブを変更した後、チームは、より大きくて動きの速いソフトロボットを制御できる8ビットの空気圧RAMチップを製造し、3Dプリントされたゴム製の手に組み込みました。 空気圧RAMは、大気圧空気を使用して「0」またはFALSE値を表し、真空を使用して「1」またはTRUE値を表します。 ソフトロボティックフィンガーは、大気圧に接続すると伸び、真空に接続すると収縮します。
RAMチップのチャネル内の大気圧と真空の組み合わせを変えることで、研究者はロボットに音符、和音、さらには「メアリー・ハッド・ア・リトル・ラム」という曲全体をピアノで演奏させることができました。
理論的には、このシステムは、電子ハードウェアを使用せずに他のロボットを操作するために使用でき、真空を作成するためにバッテリー駆動のポンプのみを使用できます。 研究者は、システム内のどこにも陽圧がなくても(通常の大気圧のみ)、ロボットまたはその制御システムの偶発的な過圧や激しい故障のリスクがないことに注目しています。 これを使ったロボット テクノロジー 運動障害のある乳児用のウェアラブルデバイスなど、人間の上または周囲での繊細な使用には特に安全です。



