
Jurutera di UC Riverside telah melancarkan memori komputer bertenaga udara yang dapat digunakan untuk mengendalikan robot lembut. Inovasi mengatasi salah satu halangan terbesar untuk memajukan robotik lembut: ketidakcocokan asas antara pneumatik dan elektronik.
Robot lembut pneumatik menggunakan udara bertekanan untuk menggerakkan anggota badan dan pencengkam yang lembut dan getah serta lebih unggul daripada robot kaku tradisional untuk melakukan tugas yang halus. Mereka juga lebih selamat untuk dikelilingi manusia. Baymax, robot pendamping kesihatan dalam filem Disney animasi 2014, Big Hero 6, adalah robot pneumatik dengan alasan yang baik.



Tetapi sistem yang ada untuk mengawal robot lembut pneumatik masih menggunakan injap elektronik dan komputer untuk mengekalkan kedudukan bahagian bergerak robot. Bahagian elektronik ini menambahkan permintaan biaya, ukuran, dan daya yang besar pada robot lembut, sehingga membatasi kelayakannya.
"Logik pneumatik" mendahului komputer elektronik dan pernah memberikan tahap kontrol lanjutan dalam berbagai produk, dari termostat dan komponen lain dari sistem kontrol iklim hingga piano pemain pada awal 1900-an. Dalam logik pneumatik, udara, bukan elektrik, mengalir melalui litar atau saluran dan tekanan udara digunakan untuk mewakili on / off atau benar / salah. Dalam komputer moden, keadaan logik ini diwakili oleh kod 1 dan 0 untuk mencetuskan atau menamatkan cas elektrik.
Robot lembut pneumatik memerlukan cara untuk mengingat dan mengekalkan kedudukan bahagian yang bergerak. Para penyelidik menyedari bahawa jika mereka dapat membuat "memori" logik pneumatik untuk robot lembut, mereka dapat menghilangkan memori elektronik yang saat ini digunakan untuk tujuan itu.
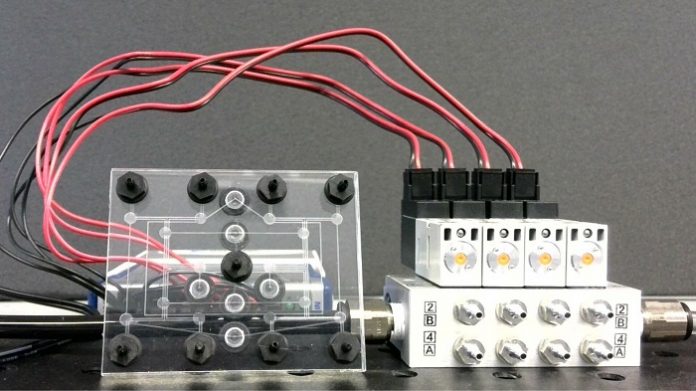
Para penyelidik membuat memori akses rawak pneumatik, atau RAM, menggunakan cip mikrofluidik dan bukannya transistor elektronik. Injap mikrofluida pada asalnya dirancang untuk mengawal aliran cecair pada cip mikrofluida, tetapi mereka juga dapat mengawal aliran udara. Injap tetap tertutup terhadap perbezaan tekanan walaupun terputus dari saluran bekalan udara, mewujudkan perbezaan tekanan terperangkap yang berfungsi sebagai kenangan dan mengekalkan keadaan penggerak robot. Susunan padat injap ini dapat melakukan operasi lanjutan dan mengurangkan perkakasan elektronik yang mahal, besar, dan memakan tenaga yang biasanya digunakan untuk mengawal robot pneumatik.
Setelah memodifikasi injap mikrofluida untuk menangani kadar aliran udara yang lebih besar, pasukan menghasilkan cip RAM pneumatik 8-bit yang dapat mengendalikan robot lembut yang lebih besar dan lebih pantas bergerak dan memasukkannya ke dalam sepasang tangan getah yang dicetak 3D. RAM pneumatik menggunakan udara tekanan atmosfera untuk mewakili nilai "0" atau SALAH, dan vakum untuk mewakili nilai "1" atau BENAR. Jari robot lembut dilanjutkan apabila disambungkan ke tekanan atmosfera dan menguncup ketika disambungkan ke vakum.
Dengan mengubah kombinasi tekanan atmosfera dan vakum dalam saluran pada cip RAM, para penyelidik dapat membuat robot memainkan nota, kord, dan bahkan keseluruhan lagu - "Mary Had a Little Lamb" - di atas piano.
Secara teori, sistem ini dapat digunakan untuk mengoperasikan robot lain tanpa perkakasan elektronik dan hanya pam berkuasa bateri untuk membuat vakum. Para penyelidik menyatakan bahawa tanpa tekanan positif di mana-mana sistem - hanya tekanan udara atmosfera yang normal - tidak ada risiko tekanan berlebihan secara tidak sengaja dan kegagalan kekerasan robot atau sistem kawalannya. Robot menggunakan ini teknologi sangat selamat untuk penggunaan halus pada atau di sekitar manusia, seperti alat yang boleh dipakai untuk bayi dengan gangguan motor.



