
Gli ingegneri della UC Riverside hanno svelato una memoria per computer alimentata ad aria che può essere utilizzata per controllare i robot morbidi. L'innovazione supera uno dei maggiori ostacoli al progresso della robotica morbida: la discrepanza fondamentale tra pneumatica ed elettronica.
I robot pneumatici morbidi utilizzano aria pressurizzata per muovere arti e pinze morbidi e gommosi e sono superiori ai tradizionali robot rigidi per l'esecuzione di compiti delicati. Sono anche più sicuri per gli umani. Baymax, il robot compagno sanitario nel film d'animazione Disney del 2014, Big Hero 6, è un robot pneumatico per una buona ragione.



Ma i sistemi esistenti per il controllo dei soft robot pneumatici utilizzano ancora valvole elettroniche e computer per mantenere la posizione delle parti mobili del robot. Queste parti elettroniche aggiungono costi, dimensioni e potenza considerevoli ai robot morbidi, limitandone la fattibilità.
La "logica pneumatica" precede i computer elettronici e una volta forniva livelli avanzati di controllo in una varietà di prodotti, dai termostati e altri componenti dei sistemi di controllo del clima ai pianoforti all'inizio del 1900. Nella logica pneumatica, l'aria, non l'elettricità, scorre attraverso circuiti o canali e la pressione dell'aria viene utilizzata per rappresentare on/off o vero/falso. Nei computer moderni, questi stati logici sono rappresentati da 1 e 0 nel codice per attivare o terminare le cariche elettriche.
I soft robot pneumatici hanno bisogno di un modo per ricordare e mantenere le posizioni delle loro parti mobili. I ricercatori si sono resi conto che se fossero riusciti a creare una "memoria" logica pneumatica per un robot morbido, avrebbero potuto eliminare la memoria elettronica attualmente utilizzata a tale scopo.
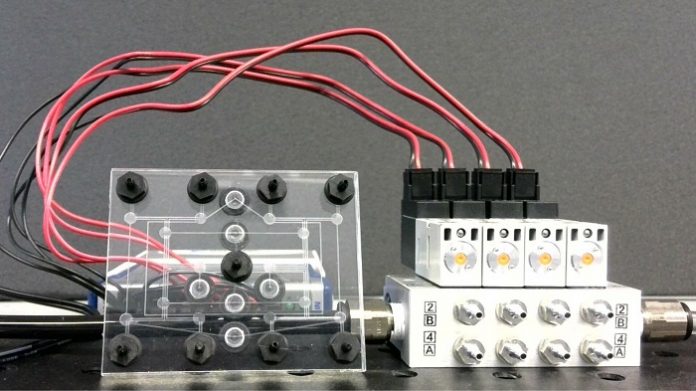
I ricercatori hanno realizzato il loro chip di memoria ad accesso casuale pneumatico, o RAM, utilizzando valvole microfluidica invece di transistor elettronici. Le valvole microfluidiche sono state originariamente progettate per controllare il flusso di liquidi su chip microfluidici, ma possono anche controllare il flusso d'aria. Le valvole rimangono sigillate contro un differenziale di pressione anche quando sono scollegate da una linea di alimentazione dell'aria, creando differenziali di pressione intrappolati che funzionano come memorie e mantengono gli stati degli attuatori di un robot. Gli array densi di queste valvole possono eseguire operazioni avanzate e ridurre l'hardware elettronico costoso, ingombrante e che consuma energia tipicamente utilizzato per controllare i robot pneumatici.
Dopo aver modificato le valvole microfluidiche per gestire portate d'aria maggiori, il team ha prodotto un chip RAM pneumatico a 8 bit in grado di controllare robot morbidi più grandi e più veloci e lo ha incorporato in un paio di mani di gomma stampate in 3D. La RAM pneumatica utilizza l'aria a pressione atmosferica per rappresentare un valore "0" o FALSO e il vuoto per rappresentare un valore "1" o VERO. Le morbide dita robotiche sono estese quando collegate alla pressione atmosferica e contratte quando collegate al vuoto.
Variando le combinazioni di pressione atmosferica e vuoto all'interno dei canali sul chip RAM, i ricercatori sono stati in grado di far suonare al robot note, accordi e persino un'intera canzone - "Mary Had a Little Lamb" - su un pianoforte.
In teoria, questo sistema potrebbe essere utilizzato per far funzionare altri robot senza alcun hardware elettronico e solo una pompa alimentata a batteria per creare il vuoto. I ricercatori osservano che senza pressione positiva in qualsiasi parte del sistema, solo la normale pressione atmosferica, non vi è alcun rischio di sovrapressurizzazione accidentale e guasto violento del robot o del suo sistema di controllo. Robot che usano questo la tecnologia sarebbe particolarmente sicuro per un uso delicato su o intorno agli esseri umani, come dispositivi indossabili per neonati con disabilità motorie.



