"معدل PWM هو نوع جديد من الطاقة محول تم تطويره من خلال تطبيق تعديل عرض النبض التكنلوجيا. المبدأ الأساسي هو جعل تيار الإدخال للمقوم قريبًا من موجة جيبية عن طريق التحكم في حالة التشغيل والإيقاف لأنبوب مفتاح الطاقة، والتيار و الجهد االكهربى في نفس المرحلة ، وبالتالي القضاء على معظم التوافقيات الحالية وجعل عامل الطاقة قريبًا من 1. تستخدم هذه المقالة TI's TMS320F240DSP لتنفيذ التحكم الرقمي في المعدل. هذه الطريقة لها المزايا التالية على التحكم التناظري.
"
المؤلف: ليو يانتشو
مقدمة 1
مقوم PWM هو نوع جديد من محولات الطاقة تم تطويره من خلال تطبيق تقنية تعديل عرض النبضة. يتمثل المبدأ الأساسي في جعل تيار الإدخال للمعدل قريبًا من موجة جيبية من خلال التحكم في حالة التشغيل والإيقاف لأنبوب مفتاح الطاقة ، ويكون التيار والجهد في نفس المرحلة ، وبالتالي القضاء على معظم التوافقيات الحالية وصنع يقترب عامل الطاقة من 1. تستخدم هذه المقالة TMS320F240DSP من TI لتنفيذ التحكم الرقمي في المعدل. هذه الطريقة لها المزايا التالية على التحكم التناظري:
1) التحكم المرن في أنظمة التحكم الرقمية ، تُستخدم خوارزميات البرامج بشكل أساسي لتنفيذ مخططات التحكم ، والتي تكون أكثر مرونة من التحكم التناظري ؛
2) الموثوقية العالية يستخدم نظام الحواسيب الصغيرة مكونات أقل وتتم معالجة جميع الإشارات رقميًا ، وبالتالي يكون التداخل صغيرًا والموثوقية عالية ؛
3) تحليل الأعطال سهل ، كشف الإشارات سيخزن المعلومات التي تم الحصول عليها ، ولديه القدرة على التذكر ، لذلك من السهل إدراك تشخيص الخطأ ؛
4) يمكن لإعداد المعلمة البسيط أن يجعل عمل تصحيح أخطاء النظام مريحًا للغاية.
بناءً على الاعتبارات المذكورة أعلاه ، تستخدم هذه المقالة نظام تحكم رقمي مع DSP كنواة للتحكم في المعدل.
2 الميزات الرئيسية لـ TMS320F240
3 مقوم PWM الرئيسي الدارة الكهربائية ومخطط التحكم
تعتمد الدائرة الرئيسية في هذه المقالة هيكل جسر كامل أحادي الطور ، كما هو موضح في الشكل 1.


في الشكل ، uN
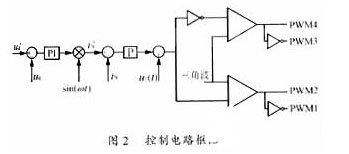

يتم وصف مبدأ التحكم المحدد بإيجاز على النحو التالي: يتم إرسال انحراف قيمة أخذ عينات جهد الخرج (ud) والجهد المرجعي المحدد (ud*) إلى PI منظم، ويتم استخدام القيمة التي تم الحصول عليها كسعة إشارة التيار المرجعي، مضروبة في نفس المرحلة مثل جهد مصدر الطاقة. بعد إشارة الجيب المرجعية [sin(ωt)] يتم استخدامها كقيمة التيار المرجعي. يتم الحصول على قيمة أخذ عينات تيار الإدخال من دائرة الحث، ويتم إرسال إشارة الخطأ الحالية إلى المنظم التناسبي. تتم إضافة قيمة الخرج مع إشارة تعويض جهد الدخل [uT


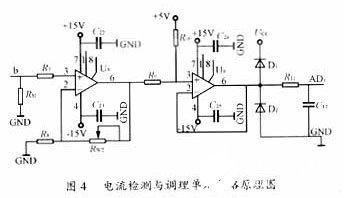
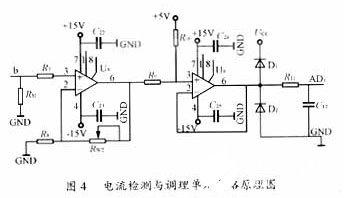
كشف التيار ودائرة وحدة التكييف الموضحة في الشكل 4. بعد إشارة الخرج الحالية للتيار مدخل بطاقة الذاكرة : نعم يتم تحويلها إلى إشارة جهد بواسطة مقاومة القياس RM ، يتم تحديد كسب مكبر الصوت الذي يتكون من مضخم التشغيل U8 بواسطة قيمة RM ، بحيث يمكن أن تقع الإشارة ثنائية القطب الناتجة في نطاق ± 5V. يشكل المضخم التشغيلي U9 مرحلة تحويل قطبية المستوى ، والتي تحول الإشارة ثنائية القطب إلى إشارة أحادية القطب بشكل متناسب. الإشارة أحادية القطب 0 ~ + 5V مطلوبة لتحويل DSPA / D ، ويتم توفير مصدر الطاقة + 5V بواسطة مزود الطاقة المرجعي المكون من LM336. مرشح تمرير منخفض بسيط يتكون من RC لتصفية التوافقيات الفرعية لتردد التبديل لتيار إدخال التيار المتردد ، والثنائيان عبارة عن ثنائيات تثبيت.

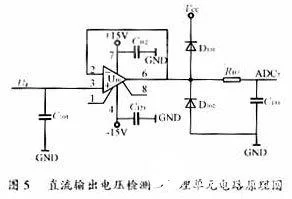
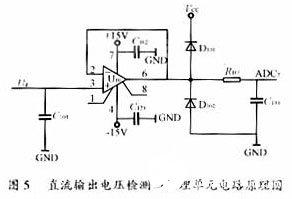
وحدة كشف وتكييف جهد خرج التيار المستمر عبارة عن مستشعر أمامي ذو حلقة مغلقة للجهد الجانبي للتيار المستمر. والغرض من ذلك هو قياس الجانب العاصمة مكثف الجهد االكهربى. بما أن جهد المكثف يحتوي على تموج معين، فإنه يحتاج إلى إدخال وصلة ترشيح. يظهر مبدأ الدائرة في الشكل 5.

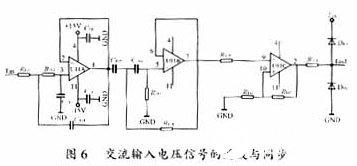
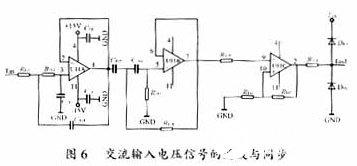
تُستخدم إشارة جهد دخل التيار المتردد كإشارة تزامن. نظرًا لأن مدخلات إشارة الجهد من شبكة الطاقة غالبًا ما لا تكون موجة جيبية نقية ، يجب ترشيحها للكشف بدقة عن مرحلة جهد دخل شبكة الطاقة. يشتمل المرشح على مرشح تمرير منخفض وفلتر تمرير عالي. جزء. يشكل المضخم التشغيلي U11A وشبكة مقاومة السعة الطرفية مرشح تمرير منخفض من الدرجة الثانية. يمكن لمرشح التمرير المنخفض تصفية التوافقيات عالية الترتيب في إشارة الإدخال لشبكة الطاقة ، بحيث يتم تحسين شكل الموجة ، لكن المرحلة متأخرة ، لذلك يتم تقديم مرشح تمرير عالي للتعويض. U11B وملحقاته المقاوم-شبكة مكثف تشكل مرشح تمرير عالي من الدرجة الثانية. يمكن أن نرى من الدائرة أن البنية الطوبولوجية لمرشحات التمرير العالي والمنخفض هي نفسها تمامًا ، وأن المقاومة والسعة موزعتان بشكل متماثل. طالما تم تحديد المعلمات المختلفة بشكل مناسب ، يمكن للمرحلة الأولى لمرشح تمرير الترددات العالية أن تعوض المرحلة المتأخرة لمرشح تمرير الترددات المنخفضة. بعد التصفية مرتين ، لا يتم تصفية التوافقيات فقط ، ويكون شكل الموجة قريبًا من الجيب ، ولا يوجد تحول في الطور. بعد التصفية ، يمر عبر دائرة التباطؤ الصفري للحصول على إشارة موجة مربعة متزامنة تمامًا مع إشارة الدخل لشبكة الطاقة. تظهر الدائرة في الشكل 6.

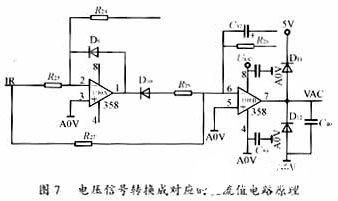
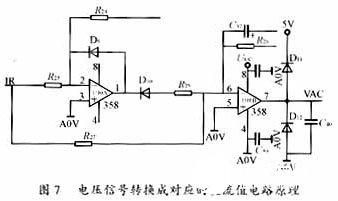
بالإضافة إلى ذلك ، فإن اكتشاف قيمة جهد الدخل لا يمثل القيمة اللحظية للجهد ولكن القيمة الفعالة ، لذلك تُستخدم دائرة مقوم الدقة الموضحة في الشكل 7 لتحويل إشارة الجهد المرشح إلى القيمة المقابلة للتيار المستمر.

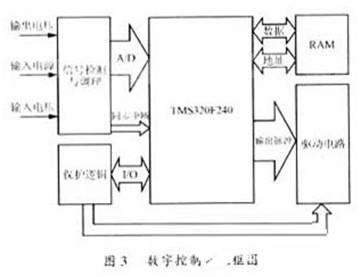
تشتمل وحدة المعالجة المركزية ودوائرها الطرفية بشكل أساسي على دوائر الساعة ودوائر إعادة الضبط وما إلى ذلك. بالإضافة إلى ذلك ، من أجل راحة التصحيح ، قام هذا النظام أيضًا بتوسيع شريحة ذاكرة الوصول العشوائي 16 بت كذاكرة برنامج. تلعب دائرة القيادة دورًا في تحسين القدرة على القيادة وعزل النبض. تضمن دائرة منطق الحماية أنه عند حدوث خطأ ، يمكن للنظام أن يمنع إشارة نبضة الخرج مباشرة من الجهاز.
5 تصميم برمجيات لنظام التحكم
يتضمن برنامج نظام التحكم في هذه المقالة بشكل أساسي الأجزاء التالية:
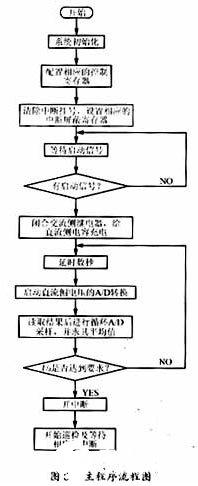
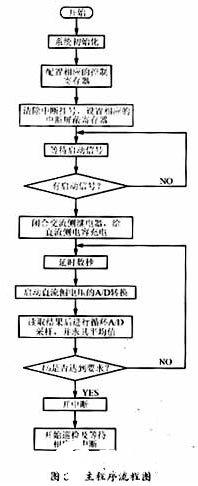
1) يكمل البرنامج الرئيسي بشكل أساسي تهيئة النظام واكتشاف الحلقة لكل كمية إدخال في النظام ؛
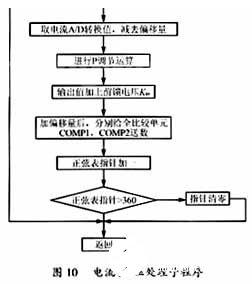
2) يكمل الروتين الفرعي للمعالجة الحالية بشكل أساسي معالجة بيانات حلقة التحكم الحالية في نظام التحكم ؛
3) يكمل الروتين الفرعي لمعالجة الجهد بشكل أساسي معالجة بيانات حلقة التحكم في الجهد في نظام التحكم ؛
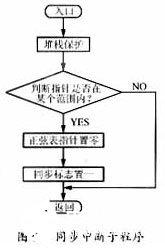
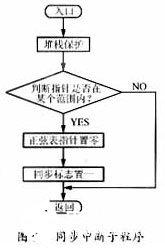
4) يأخذ الروتين الفرعي لمقاطعة التزامن إشارة التزامن كمصدر للمقاطعة ويضع علامة التزامن للحفاظ على إيقاع تشغيل البرنامج لنظام التحكم بأكمله بما يتوافق مع جهد الشبكة ؛
5) الموقت يقطع الروتين. هذا هو الجزء الأساسي من البرنامج بأكمله ، والذي يولد موجات PWM المطلوبة وفقًا لنتائج كل جزء من العملية.
يظهر مخطط تدفق البرنامج في الأشكال 8 و 9 و 10.



6 نتائج تجريبية
باستخدام المخطط أعلاه ، صنعت هذه المقالة جهازًا تجريبيًا منخفض الطاقة في المختبر ، ومعلمات كل جزء كما يلي:
جهد الإدخال AC 170V
انتاج التيار المستمر 300 فولت
انتاج الطاقة 360W
تظهر الأشكال الموجية لكل جزء في الشكلين 11 و 12.


7 الخاتمة
معدل PWM هو نوع جديد من محولات الطاقة ، والذي يمكن أن يجعل عامل طاقة الإدخال قريبًا من 1. تعتمد هذه الورقة طريقة التحكم في التتبع الحالي ، وتصمم نظام تحكم رقمي مع رقاقة DSP عالية الأداء TMS320F240 باعتبارها جوهر ، وتنفذ منخفضة تجارب القوة. أخيرًا ، أثبتت التجربة أن نظام التحكم يتمتع بمزايا التحكم المرن والدقة العالية والاستجابة الديناميكية الجيدة والتداخل القليل.
المؤلف: ليو يانتشو
مقدمة 1
مقوم PWM هو نوع جديد من محولات الطاقة تم تطويره من خلال تطبيق تقنية تعديل عرض النبضة. يتمثل المبدأ الأساسي في جعل تيار الإدخال للمعدل قريبًا من موجة جيبية من خلال التحكم في حالة التشغيل والإيقاف لأنبوب مفتاح الطاقة ، ويكون التيار والجهد في نفس المرحلة ، وبالتالي القضاء على معظم التوافقيات الحالية وصنع يقترب عامل الطاقة من 1. تستخدم هذه المقالة TMS320F240DSP من TI لتنفيذ التحكم الرقمي في المعدل. هذه الطريقة لها المزايا التالية على التحكم التناظري:
1) التحكم المرن في أنظمة التحكم الرقمية ، تُستخدم خوارزميات البرامج بشكل أساسي لتنفيذ مخططات التحكم ، والتي تكون أكثر مرونة من التحكم التناظري ؛
2) الموثوقية العالية يستخدم نظام الحواسيب الصغيرة مكونات أقل وتتم معالجة جميع الإشارات رقميًا ، وبالتالي يكون التداخل صغيرًا والموثوقية عالية ؛
3) تحليل الأعطال سهل ، كشف الإشارات سيخزن المعلومات التي تم الحصول عليها ، ولديه القدرة على التذكر ، لذلك من السهل إدراك تشخيص الخطأ ؛
4) يمكن لإعداد المعلمة البسيط أن يجعل عمل تصحيح أخطاء النظام مريحًا للغاية.
بناءً على الاعتبارات المذكورة أعلاه ، تستخدم هذه المقالة نظام تحكم رقمي مع DSP كنواة للتحكم في المعدل.
2 الميزات الرئيسية لـ TMS320F240
3 PWM مقوم الدائرة الرئيسية ومخطط التحكم
تعتمد الدائرة الرئيسية في هذه المقالة هيكل جسر كامل أحادي الطور ، كما هو موضح في الشكل 1.
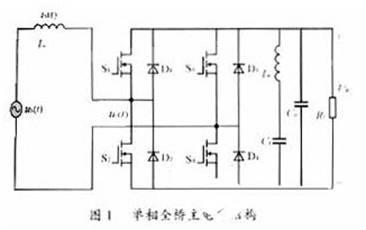
في الشكل ، uN
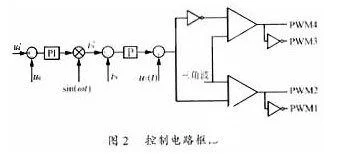
يتم وصف مبدأ التحكم المحدد بإيجاز على النحو التالي: يتم إرسال الانحراف عن قيمة أخذ عينات جهد الخرج (ud) والجهد المرجعي المحدد (ud *) إلى منظم PI ، ويتم استخدام القيمة التي تم الحصول عليها كسعة للتيار المرجعي مضروبة في نفس المرحلة مثل جهد إمداد الطاقة بعد إشارة الجيب المرجعية [sin (ωt)] يتم استخدامها كقيمة للتيار المرجعي. يتم الحصول على قيمة أخذ عينات الإدخال الحالية من دائرة الحث ، ويتم إرسال إشارة الخطأ الحالية إلى المنظم النسبي. تتم إضافة قيمة الخرج مع إشارة تعويض جهد الدخل [uT
دارة وحدة الكشف عن التيار والتكييف الموضحة في الشكل 4. بعد تحويل إشارة الخرج الحالية لمستشعر التيار إلى إشارة جهد بواسطة مقاومة القياس RM ، يتم تحديد كسب مكبر الصوت الناتج عن مضخم التشغيل U8 بواسطة قيمة RM ، بحيث يمكن أن تقع إشارة خرج القطبين في نطاق ± 5V. يشكل المضخم التشغيلي U9 مرحلة تحويل قطبية المستوى ، والتي تحول الإشارة ثنائية القطب إلى إشارة أحادية القطب بشكل متناسب. الإشارة أحادية القطب 0 ~ + 5V مطلوبة لتحويل DSPA / D ، ويتم توفير مصدر الطاقة + 5V بواسطة مزود الطاقة المرجعي المكون من LM336. مرشح تمرير منخفض بسيط يتكون من RC لتصفية التوافقيات الفرعية لتردد التبديل لتيار إدخال التيار المتردد ، والثنائيان عبارة عن ثنائيات تثبيت.
وحدة الكشف عن جهد خرج التيار المستمر وتكييفه عبارة عن مستشعر أمامي مغلق الحلقة للجهد الجانبي للتيار المستمر. والغرض من ذلك هو قياس جهد مكثف جانب التيار المستمر. نظرًا لأن جهد المكثف يحتوي على تموج معين ، فإنه يحتاج إلى إدخال ارتباط ترشيح. يظهر مبدأ الدائرة في الشكل 5.
تُستخدم إشارة جهد دخل التيار المتردد كإشارة تزامن. نظرًا لأن مدخلات إشارة الجهد من شبكة الطاقة غالبًا ما لا تكون موجة جيبية نقية ، فيجب ترشيحها للكشف بدقة عن مرحلة جهد دخل شبكة الطاقة. يشتمل المرشح على مرشح تمرير منخفض وفلتر تمرير عالي. جزء. يشكل المضخم التشغيلي U11A وشبكة سعة المقاومة الطرفية مرشح تمرير منخفض من الدرجة الثانية. يمكن لمرشح التمرير المنخفض تصفية التوافقيات عالية الترتيب في إشارة الإدخال لشبكة الطاقة ، بحيث يتم تحسين شكل الموجة ، لكن المرحلة متأخرة ، لذلك يتم تقديم مرشح تمرير عالي للتعويض. يشكل U11B وشبكة مكثف المقاومة الطرفية الخاصة به مرشح تمرير عالي من الدرجة الثانية. يمكن أن نرى من الدائرة أن البنية الطوبولوجية لمرشحات التمرير العالي والمنخفض هي نفسها تمامًا ، وأن المقاومة والسعة موزعتان بشكل متماثل. طالما تم تحديد المعلمات المختلفة بشكل مناسب ، فإن المرحلة الأولى لمرشح تمرير الترددات العالية يمكنها فقط موازنة المرحلة المتأخرة لمرشح تمرير الترددات المنخفضة. بعد التصفية مرتين ، لا يتم تصفية التوافقيات فقط ، ويكون شكل الموجة قريبًا من الجيب ، ولا يوجد تحول في الطور. بعد التصفية ، يمر عبر دائرة التباطؤ الصفري للحصول على إشارة موجة مربعة متزامنة تمامًا مع إشارة الدخل لشبكة الطاقة. تظهر الدائرة في الشكل 6.
بالإضافة إلى ذلك ، فإن اكتشاف قيمة جهد الدخل لا يمثل القيمة اللحظية للجهد ولكن القيمة الفعالة ، لذلك تُستخدم دائرة مقوم الدقة الموضحة في الشكل 7 لتحويل إشارة الجهد المرشح إلى القيمة المقابلة للتيار المستمر.
تشتمل وحدة المعالجة المركزية ودوائرها الطرفية بشكل أساسي على دوائر الساعة ودوائر إعادة الضبط وما إلى ذلك. بالإضافة إلى ذلك ، من أجل راحة التصحيح ، قام هذا النظام أيضًا بتوسيع شريحة ذاكرة الوصول العشوائي 16 بت كذاكرة برنامج. تلعب دائرة القيادة دورًا في تحسين القدرة على القيادة وعزل النبض. تضمن دائرة منطق الحماية أنه عند حدوث خطأ ، يمكن للنظام أن يمنع إشارة نبضة الخرج مباشرة من الجهاز.
5 تصميم برمجيات لنظام التحكم
يتضمن برنامج نظام التحكم في هذه المقالة بشكل أساسي الأجزاء التالية:
1) يكمل البرنامج الرئيسي بشكل أساسي تهيئة النظام واكتشاف الحلقة لكل كمية إدخال في النظام ؛
2) يكمل الروتين الفرعي للمعالجة الحالية بشكل أساسي معالجة بيانات حلقة التحكم الحالية في نظام التحكم ؛
3) يكمل الروتين الفرعي لمعالجة الجهد بشكل أساسي معالجة بيانات حلقة التحكم في الجهد في نظام التحكم ؛
4) يأخذ الروتين الفرعي لمقاطعة التزامن إشارة التزامن كمصدر للمقاطعة ويضع علامة التزامن للحفاظ على إيقاع تشغيل البرنامج لنظام التحكم بأكمله متسقًا مع جهد الشبكة ؛
5) الموقت يقطع الروتين. هذا هو الجزء الأساسي من البرنامج بأكمله ، والذي يولد موجات PWM المطلوبة وفقًا لنتائج كل جزء من العملية.
يظهر مخطط تدفق البرنامج في الأشكال 8 و 9 و 10.

6 نتائج تجريبية
باستخدام المخطط أعلاه ، صنعت هذه المقالة جهازًا تجريبيًا منخفض الطاقة في المختبر ، ومعلمات كل جزء كما يلي:
جهد الإدخال AC 170V
انتاج التيار المستمر 300 فولت
انتاج الطاقة 360W
تظهر الأشكال الموجية لكل جزء في الشكلين 11 و 12.

7 الخاتمة
معدل PWM هو نوع جديد من محولات الطاقة ، والذي يمكن أن يجعل عامل طاقة الإدخال قريبًا من 1. تعتمد هذه الورقة طريقة التحكم في التتبع الحالي ، وتصمم نظام تحكم رقمي مع رقاقة DSP عالية الأداء TMS320F240 باعتبارها جوهر ، وتنفذ منخفضة تجارب القوة. أخيرًا ، أثبتت التجربة أن نظام التحكم يتمتع بمزايا التحكم المرن والدقة العالية والاستجابة الديناميكية الجيدة والتداخل القليل.
الروابط: R0878LS20K LMG6381QHGE