"Il raddrizzatore PWM è un nuovo tipo di alimentazione convertitore sviluppato applicando la modulazione di larghezza di impulso la tecnologia. Il principio di base è rendere la corrente di ingresso del raddrizzatore vicina a un'onda sinusoidale controllando lo stato on-off del tubo dell'interruttore di alimentazione e la corrente e voltaggio sono nella stessa fase, eliminando così la maggior parte delle armoniche di corrente e portando il fattore di potenza vicino a 1. Questo articolo utilizza il TMS320F240DSP di TI per implementare il controllo digitale del raddrizzatore. Questo metodo presenta i seguenti vantaggi rispetto al controllo analogico.
"
Autore: Liu Yanzhu
1 Introduzione
Il raddrizzatore PWM è un nuovo tipo di convertitore di potenza sviluppato applicando la tecnologia di modulazione della larghezza di impulso. Il principio di base è quello di rendere la corrente di ingresso del raddrizzatore vicino a un'onda sinusoidale controllando lo stato on-off del tubo dell'interruttore di alimentazione e la corrente e la tensione sono nella stessa fase, eliminando così la maggior parte delle armoniche di corrente e rendendo il fattore di potenza vicino a 1. Questo articolo utilizza il TMS320F240DSP di TI per implementare il controllo digitale del raddrizzatore. Questo metodo presenta i seguenti vantaggi rispetto al controllo analogico:
1) Controllo flessibile Nei sistemi di controllo digitali, gli algoritmi software sono principalmente utilizzati per implementare schemi di controllo, che sono più flessibili del controllo analogico;
2) Alta affidabilità Il sistema del microcomputer utilizza meno componenti e tutti i segnali vengono elaborati digitalmente, quindi l'interferenza è piccola e l'affidabilità è elevata;
3) L'analisi dei guasti è facile, il rilevamento del segnale memorizzerà le informazioni ottenute e ha la capacità di ricordare, quindi è facile realizzare la diagnosi dei guasti;
4) La semplice impostazione dei parametri può rendere molto conveniente il lavoro di debug del sistema.
Sulla base delle considerazioni di cui sopra, questo articolo utilizza un sistema di controllo digitale con DSP come nucleo per controllare il raddrizzatore.
2 Caratteristiche principali di TMS320F240
3 PWM raddrizzatore principale circuito e schema di controllo
Il circuito principale in questo articolo adotta una struttura a ponte intero monofase, come mostrato nella Figura 1.


Nella figura, uN
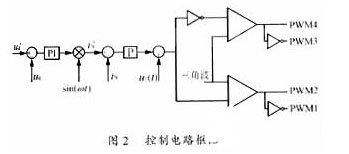

Il principio di controllo specifico è brevemente descritto come segue: La deviazione del valore di campionamento della tensione di uscita (ud) e della tensione di riferimento specificata (ud*) viene inviata al PI regolatore, e il valore ottenuto viene utilizzato come ampiezza del segnale di corrente di riferimento, moltiplicato per la stessa fase della tensione di alimentazione. Dopo il segnale sinusoidale di riferimento[sin(ωt)]viene utilizzato come valore della corrente di riferimento. Il valore di campionamento della corrente in ingresso viene ottenuto dal circuito di induttanza e il segnale di errore di corrente viene inviato al regolatore proporzionale. Il valore di uscita viene aggiunto al segnale di compensazione della tensione di ingresso[uT


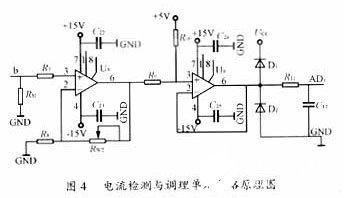
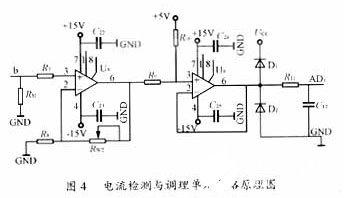
Circuito dell'unità di rilevamento e condizionamento della corrente mostrato in Figura 4. Dopo il segnale di corrente in uscita della corrente sensore viene convertito in segnale di tensione dalla resistenza di misura RM, il guadagno dell'amplificatore formato dall'amplificatore operazionale U8 è determinato dal valore di RM, in modo che il segnale bipolare di uscita possa rientrare nel range di ±5V. L'amplificatore operazionale U9 costituisce uno stadio di conversione della polarità di livello, che converte proporzionalmente il segnale bipolare in un segnale unipolare. Il segnale unipolare 0~+5V è necessario per la conversione DSPA/D, e l'alimentazione +5V è fornita dall'alimentatore di riferimento composto da LM336. Un semplice filtro passa basso composto da RC per filtrare le subarmoniche della frequenza di commutazione della corrente di ingresso CA, e i due diodi sono diodi di bloccaggio.

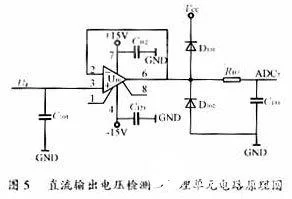
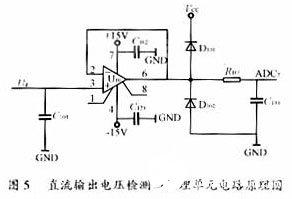
L'unità di rilevamento e condizionamento della tensione di uscita CC è un sensore front-end a circuito chiuso per la tensione lato CC. Lo scopo è misurare il lato CC condensatore voltaggio. Poiché la tensione del condensatore contiene una certa ondulazione, è necessario introdurre un collegamento di filtraggio. Il principio del circuito è mostrato nella Figura 5.

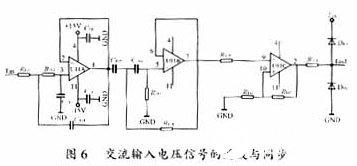
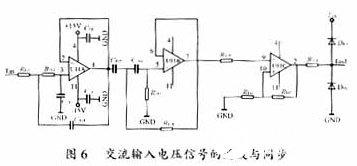
Il segnale della tensione di ingresso CA viene utilizzato come segnale di sincronizzazione. Poiché il segnale di tensione in ingresso dalla rete elettrica spesso non è un'onda sinusoidale pura, deve essere filtrato per rilevare con precisione la fase della tensione di ingresso della rete elettrica. Il filtro include un filtro passa basso e un filtro passa alto. parte. L'amplificatore operazionale U11A e la rete periferica resistenza-capacità formano un filtro passa basso del secondo ordine. Il filtro passa-basso può filtrare le armoniche di ordine alto nel segnale di ingresso della rete elettrica, in modo che la forma d'onda sia migliorata, ma la fase è in ritardo, quindi viene introdotto un filtro passa-alto per la compensazione. U11B e la sua periferica Resistore- La rete di condensatori forma un filtro passa-alto del secondo ordine. Dal circuito si può vedere che la struttura topologica dei filtri passa alto e passa basso è esattamente la stessa e la resistenza e la capacità sono distribuite simmetricamente. Finché i vari parametri sono selezionati in modo appropriato, la fase principale del filtro passa-alto può solo compensare la fase di ritardo del filtro passa-basso. Dopo aver filtrato due volte, non solo le armoniche vengono filtrate, la forma d'onda è vicina al seno e non c'è sfasamento. Dopo il filtraggio, passa attraverso il circuito di isteresi di zero-crossing per ottenere un segnale ad onda quadra completamente sincronizzato con il segnale di ingresso della rete elettrica. Il circuito è mostrato in Figura 6.

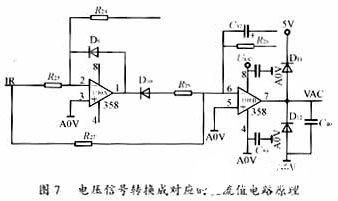
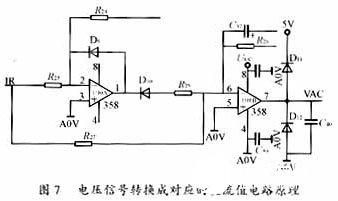
Inoltre, il rilevamento del valore della tensione di ingresso non è il valore istantaneo della tensione ma il valore effettivo, quindi il circuito raddrizzatore di precisione mostrato in Fig. 7 viene utilizzato per convertire il segnale di tensione filtrato nel corrispondente valore CC.

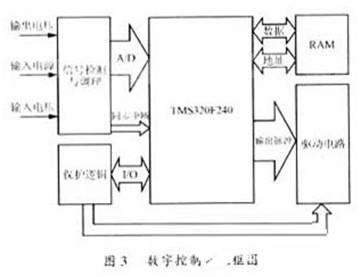
La CPU e i suoi circuiti periferici includono principalmente circuiti di clock, circuiti di ripristino e così via. Inoltre, per comodità di debug, questo sistema ha anche ampliato un chip RAM a 16 bit come memoria di programma. Il circuito di pilotaggio svolge un ruolo nel migliorare la capacità di pilotaggio e l'isolamento dell'impulso. Il circuito logico di protezione assicura che quando si verifica un guasto, il sistema può bloccare direttamente il segnale di impulso in uscita dall'hardware.
5 Progettazione software del sistema di controllo
Il software del sistema di controllo in questo articolo include principalmente le seguenti parti:
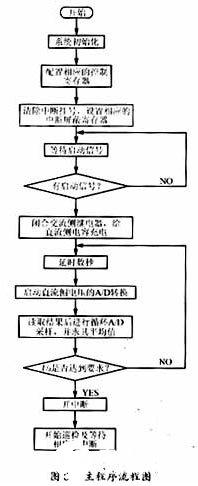
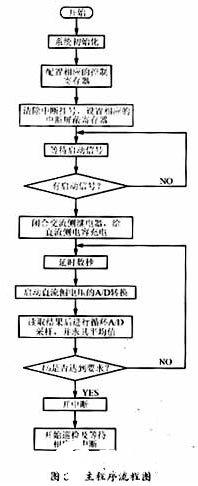
1) Il programma principale completa principalmente l'inizializzazione del sistema e il rilevamento del loop di ciascuna grandezza in ingresso nel sistema;
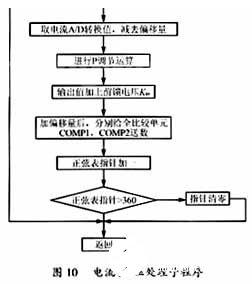
2) Il sottoprogramma di elaborazione corrente completa principalmente l'elaborazione dei dati dell'anello di controllo corrente nel sistema di controllo;
3) La subroutine di elaborazione della tensione completa principalmente l'elaborazione dei dati dell'anello di controllo della tensione nel sistema di controllo;
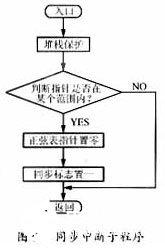
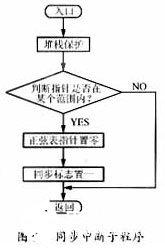
4) La subroutine di interruzione della sincronizzazione prende il segnale di sincronizzazione come sorgente di interruzione e imposta il flag di sincronizzazione per mantenere il ritmo di esecuzione del software dell'intero sistema di controllo coerente con la tensione di rete;
5) Sottoprogramma di interruzione del timer. Questa è la parte centrale dell'intero programma, che genera le onde PWM richieste in base ai risultati di ciascuna parte dell'operazione.
Il diagramma di flusso del software è mostrato nelle Figure 8, 9 e 10.



6 Risultati sperimentali
Utilizzando lo schema sopra, questo articolo ha costruito un dispositivo sperimentale a bassa potenza in laboratorio e i parametri di ciascuna parte sono i seguenti:
Tensione di ingresso CA 170V
Tensione di uscita DC 300V
Potenza di uscita 360 W.
Le forme d'onda di ciascuna parte sono mostrate nelle Figure 11 e 12.


Conclusione 7
Il raddrizzatore PWM è un nuovo tipo di convertitore di potenza, che può rendere il fattore di potenza in ingresso vicino a 1. Questo documento adotta il metodo di controllo del tracciamento corrente, progetta un sistema di controllo digitale con chip DSP ad alte prestazioni TMS320F240 come nucleo e conduce a bassa -esperimenti di potenza. Infine, l'esperimento dimostra che il sistema di controllo presenta i vantaggi di un controllo flessibile, alta precisione, buona risposta dinamica e poca interferenza.
Autore: Liu Yanzhu
1 Introduzione
Il raddrizzatore PWM è un nuovo tipo di convertitore di potenza sviluppato applicando la tecnologia di modulazione della larghezza di impulso. Il principio di base è quello di rendere la corrente di ingresso del raddrizzatore vicino a un'onda sinusoidale controllando lo stato on-off del tubo dell'interruttore di alimentazione e la corrente e la tensione sono nella stessa fase, eliminando così la maggior parte delle armoniche di corrente e rendendo il fattore di potenza vicino a 1. Questo articolo utilizza il TMS320F240DSP di TI per implementare il controllo digitale del raddrizzatore. Questo metodo presenta i seguenti vantaggi rispetto al controllo analogico:
1) Controllo flessibile Nei sistemi di controllo digitali, gli algoritmi software sono principalmente utilizzati per implementare schemi di controllo, che sono più flessibili del controllo analogico;
2) Alta affidabilità Il sistema del microcomputer utilizza meno componenti e tutti i segnali vengono elaborati digitalmente, quindi l'interferenza è piccola e l'affidabilità è elevata;
3) L'analisi dei guasti è facile, il rilevamento del segnale memorizzerà le informazioni ottenute e ha la capacità di ricordare, quindi è facile realizzare la diagnosi dei guasti;
4) La semplice impostazione dei parametri può rendere molto conveniente il lavoro di debug del sistema.
Sulla base delle considerazioni di cui sopra, questo articolo utilizza un sistema di controllo digitale con DSP come nucleo per controllare il raddrizzatore.
2 Caratteristiche principali di TMS320F240
3 Circuito principale del raddrizzatore PWM e schema di controllo
Il circuito principale in questo articolo adotta una struttura a ponte intero monofase, come mostrato nella Figura 1.
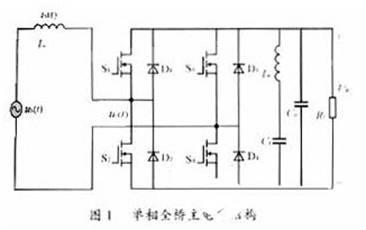
Nella figura, uN
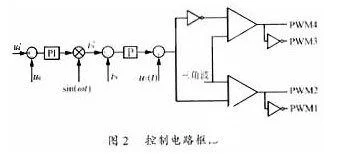
Il principio di controllo specifico è brevemente descritto come segue: La deviazione del valore di campionamento della tensione di uscita (ud) e la tensione di riferimento data (ud*) viene inviata al regolatore PI e il valore ottenuto viene utilizzato come ampiezza della corrente di riferimento segnale, moltiplicato per la stessa fase della tensione di alimentazione Dopo il segnale sinusoidale di riferimento [sin(ωt)] viene utilizzato come valore della corrente di riferimento. Il valore di campionamento della corrente in ingresso è ottenuto dal circuito dell'induttanza e il segnale di errore di corrente è inviato al regolatore proporzionale. Il valore di uscita viene aggiunto con il segnale di compensazione della tensione di ingresso [uT
Circuito dell'unità di rilevamento e condizionamento della corrente mostrato in Figura 4. Dopo che il segnale di corrente di uscita del sensore di corrente è stato convertito in un segnale di tensione dalla resistenza di misura RM, il guadagno dell'amplificatore formato dall'amplificatore operazionale U8 è determinato dal valore di RM , in modo che il segnale bipolare in uscita possa rientrare nell'intervallo di ±5V. L'amplificatore operazionale U9 costituisce uno stadio di conversione della polarità di livello, che converte proporzionalmente il segnale bipolare in un segnale unipolare. Il segnale unipolare 0~+5V è necessario per la conversione DSPA/D, e l'alimentazione +5V è fornita dall'alimentatore di riferimento composto da LM336. Un semplice filtro passa basso composto da RC per filtrare le subarmoniche della frequenza di commutazione della corrente di ingresso CA, e i due diodi sono diodi di bloccaggio.
L'unità di rilevamento e condizionamento della tensione di uscita CC è un sensore front-end ad anello chiuso per la tensione laterale CC. Lo scopo è misurare la tensione del condensatore lato CC. Poiché la tensione del condensatore contiene una certa ondulazione, è necessario introdurre un collegamento di filtraggio. Il principio del circuito è mostrato in Figura 5.
Il segnale della tensione di ingresso CA viene utilizzato come segnale di sincronizzazione. Poiché il segnale di tensione in ingresso dalla rete elettrica spesso non è un'onda sinusoidale pura, deve essere filtrato per rilevare con precisione la fase della tensione di ingresso della rete elettrica. Il filtro include un filtro passa basso e un filtro passa alto. parte. L'amplificatore operazionale U11A e la rete periferica resistenza-capacità formano un filtro passa basso del secondo ordine. Il filtro passa-basso può filtrare le armoniche di ordine alto nel segnale di ingresso della rete elettrica, in modo che la forma d'onda sia migliorata, ma la fase è in ritardo, quindi viene introdotto un filtro passa-alto per la compensazione. U11B e la sua rete di resistori-condensatori periferici formano un filtro passa-alto di secondo ordine. Dal circuito si può vedere che la struttura topologica dei filtri passa alto e passa basso è esattamente la stessa e la resistenza e la capacità sono distribuite simmetricamente. Finché i vari parametri sono selezionati in modo appropriato, la fase principale del filtro passa-alto può solo compensare la fase di ritardo del filtro passa-basso. Dopo aver filtrato due volte, non solo le armoniche vengono filtrate, la forma d'onda è vicina al seno e non c'è sfasamento. Dopo il filtraggio, passa attraverso il circuito di isteresi di zero-crossing per ottenere un segnale ad onda quadra completamente sincronizzato con il segnale di ingresso della rete elettrica. Il circuito è mostrato in Figura 6.
Inoltre, il rilevamento del valore della tensione di ingresso non è il valore istantaneo della tensione ma il valore effettivo, quindi il circuito raddrizzatore di precisione mostrato in Fig. 7 viene utilizzato per convertire il segnale di tensione filtrato nel corrispondente valore CC.
La CPU e i suoi circuiti periferici includono principalmente circuiti di clock, circuiti di ripristino e così via. Inoltre, per comodità di debug, questo sistema ha anche ampliato un chip RAM a 16 bit come memoria di programma. Il circuito di pilotaggio svolge un ruolo nel migliorare la capacità di pilotaggio e l'isolamento dell'impulso. Il circuito logico di protezione assicura che quando si verifica un guasto, il sistema può bloccare direttamente il segnale di impulso in uscita dall'hardware.
5 Progettazione software del sistema di controllo
Il software del sistema di controllo in questo articolo include principalmente le seguenti parti:
1) Il programma principale completa principalmente l'inizializzazione del sistema e il rilevamento del loop di ciascuna grandezza in ingresso nel sistema;
2) Il sottoprogramma di elaborazione corrente completa principalmente l'elaborazione dei dati dell'anello di controllo corrente nel sistema di controllo;
3) La subroutine di elaborazione della tensione completa principalmente l'elaborazione dei dati dell'anello di controllo della tensione nel sistema di controllo;
4) La subroutine di interruzione della sincronizzazione prende il segnale di sincronizzazione come sorgente di interruzione e imposta il flag di sincronizzazione per mantenere il ritmo di funzionamento del software dell'intero sistema di controllo coerente con la tensione di rete;
5) Sottoprogramma di interruzione del timer. Questa è la parte centrale dell'intero programma, che genera le onde PWM richieste in base ai risultati di ciascuna parte dell'operazione.
Il diagramma di flusso del software è mostrato nelle Figure 8, 9 e 10.

6 Risultati sperimentali
Utilizzando lo schema sopra, questo articolo ha costruito un dispositivo sperimentale a bassa potenza in laboratorio e i parametri di ciascuna parte sono i seguenti:
Tensione di ingresso CA 170V
Tensione di uscita DC 300V
Potenza di uscita 360 W.
Le forme d'onda di ciascuna parte sono mostrate nelle Figure 11 e 12.

Conclusione 7
Il raddrizzatore PWM è un nuovo tipo di convertitore di potenza, che può rendere il fattore di potenza in ingresso vicino a 1. Questo documento adotta il metodo di controllo del tracciamento corrente, progetta un sistema di controllo digitale con chip DSP ad alte prestazioni TMS320F240 come nucleo e conduce a bassa -esperimenti di potenza. Infine, l'esperimento dimostra che il sistema di controllo presenta i vantaggi di un controllo flessibile, alta precisione, buona risposta dinamica e poca interferenza.
I Link: R0878LS20K LMG6381QHGE