"Bộ chỉnh lưu PWM là một loại công suất mới chuyển đổi được phát triển bằng cách áp dụng điều chế độ rộng xung công nghệ. Nguyên tắc cơ bản là làm cho dòng điện đầu vào của bộ chỉnh lưu gần với sóng hình sin bằng cách điều khiển trạng thái bật tắt của ống công tắc nguồn, dòng điện và Vôn ở trong cùng một pha, do đó loại bỏ hầu hết các sóng hài hiện tại và làm cho hệ số công suất gần bằng 1. Bài báo này sử dụng TMS320F240DSP của TI để thực hiện điều khiển kỹ thuật số của bộ chỉnh lưu. Phương pháp này có những ưu điểm sau so với điều khiển tương tự.
"
Tác giả: Liu Yanzhu
1 Giới thiệu
Bộ chỉnh lưu PWM là một loại bộ biến đổi công suất mới được phát triển bằng cách áp dụng công nghệ điều chế độ rộng xung. Nguyên tắc cơ bản là làm cho dòng điện đầu vào của bộ chỉnh lưu gần với một sóng sin bằng cách điều khiển trạng thái bật-tắt của ống công tắc nguồn, dòng điện và điện áp ở cùng một pha, do đó loại bỏ hầu hết các sóng hài hiện tại và làm hệ số công suất gần bằng 1. Bài báo này sử dụng TMS320F240DSP của TI để thực hiện điều khiển kỹ thuật số của bộ chỉnh lưu. Phương pháp này có những ưu điểm sau so với điều khiển tương tự:
1) Điều khiển linh hoạt Trong hệ thống điều khiển kỹ thuật số, các thuật toán phần mềm chủ yếu được sử dụng để thực hiện các sơ đồ điều khiển, linh hoạt hơn điều khiển tương tự;
2) Độ tin cậy cao Hệ thống vi máy tính sử dụng ít thành phần hơn và tất cả các tín hiệu đều được xử lý kỹ thuật số, do đó nhiễu nhỏ và độ tin cậy cao;
3) Phân tích lỗi dễ dàng, phát hiện tín hiệu sẽ lưu trữ thông tin thu được, và nó có khả năng ghi nhớ, do đó, dễ dàng nhận ra chẩn đoán lỗi;
4) Cài đặt tham số đơn giản có thể làm cho công việc gỡ lỗi hệ thống rất thuận tiện.
Dựa trên những cân nhắc ở trên, bài viết này sử dụng hệ thống điều khiển kỹ thuật số với DSP làm lõi để điều khiển bộ chỉnh lưu.
2 Tính năng chính của TMS320F240
3 bộ chỉnh lưu PWM chính mạch và kế hoạch kiểm soát
Mạch chính trong bài viết này sử dụng cấu trúc toàn cầu một pha, như trong Hình 1.


Trong hình, uN
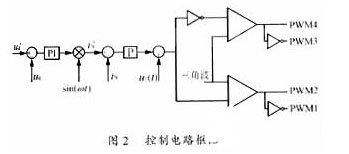

Nguyên lý điều khiển cụ thể được mô tả ngắn gọn như sau: Độ lệch của giá trị lấy mẫu điện áp đầu ra (ud) và điện áp tham chiếu đã cho (ud*) được gửi đến PI điều chỉnh, và giá trị thu được được sử dụng làm biên độ của tín hiệu dòng tham chiếu, nhân với cùng pha với điện áp nguồn. Sau tín hiệu hình sin tham chiếu [sin(ωt)] nó được sử dụng làm giá trị của dòng điện tham chiếu. Giá trị lấy mẫu dòng điện đầu vào được lấy từ mạch điện cảm và tín hiệu lỗi dòng điện được gửi đến bộ điều chỉnh tỷ lệ. Giá trị đầu ra được thêm vào bằng tín hiệu bù điện áp đầu vào [uT


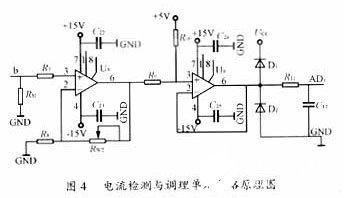
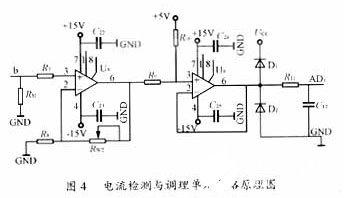
Mạch đơn vị phát hiện và điều hòa dòng điện được trình bày trong Hình 4. Sau khi tín hiệu dòng điện đầu ra của dòng điện cảm biến được chuyển đổi thành tín hiệu điện áp bởi điện trở đo RM, độ lợi của bộ khuếch đại được tạo thành bởi bộ khuếch đại hoạt động U8 được xác định bởi giá trị của RM, do đó tín hiệu lưỡng cực đầu ra có thể nằm trong phạm vi ± 5V. Bộ khuếch đại hoạt động U9 tạo thành một giai đoạn chuyển đổi phân cực mức, chuyển đổi tín hiệu lưỡng cực thành tín hiệu đơn cực theo tỷ lệ. Tín hiệu 0 ~ + 5V đơn cực được yêu cầu để chuyển đổi DSPA / D và nguồn + 5V được cung cấp bởi bộ nguồn tham chiếu bao gồm LM336. Một bộ lọc thông thấp đơn giản bao gồm RC để lọc ra các sóng hài phụ của tần số chuyển mạch của dòng điện đầu vào AC và hai điốt là điốt kẹp.

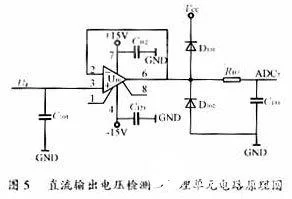
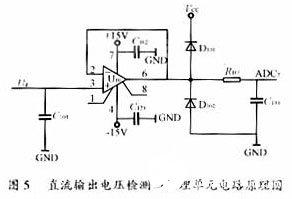
Bộ phát hiện và điều hòa điện áp đầu ra DC là một cảm biến ngoại vi vòng kín dành cho điện áp phía DC. Mục đích là để đo phía DC tụ Vôn. Vì điện áp của tụ điện có độ gợn sóng nhất định nên nó cần có một liên kết lọc. Nguyên lý mạch điện được thể hiện trong hình 5.

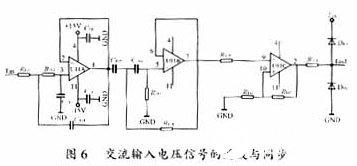
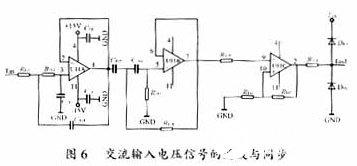
Tín hiệu điện áp đầu vào AC được sử dụng làm tín hiệu đồng bộ hóa. Do tín hiệu điện áp đầu vào từ lưới điện thường không phải là sóng sin thuần túy, nên nó phải được lọc để phát hiện chính xác pha của điện áp đầu vào lưới điện. Bộ lọc bao gồm một bộ lọc thông thấp và một bộ lọc thông cao. phần. Bộ khuếch đại hoạt động U11A và mạng điện dung kháng ngoại vi tạo thành bộ lọc thông thấp bậc hai. Bộ lọc thông thấp có thể lọc ra các sóng hài bậc cao trong tín hiệu đầu vào của lưới điện, do đó dạng sóng được cải thiện, nhưng pha bị trễ, vì vậy bộ lọc thông cao được đưa vào để bù. U11B và thiết bị ngoại vi của nó Điện trở-mạng tụ điện tạo thành bộ lọc thông cao bậc hai. Từ mạch điện có thể thấy rằng cấu trúc tôpô của bộ lọc thông cao và thông thấp là hoàn toàn giống nhau, điện trở và điện dung được phân bố đối xứng. Miễn là các tham số khác nhau được chọn một cách thích hợp, pha đầu tiên của bộ lọc thông cao có thể bù đắp cho pha trễ của bộ lọc thông thấp. Sau khi lọc hai lần, không chỉ các sóng hài được lọc ra, dạng sóng gần với sin và không có sự dịch chuyển pha. Sau khi lọc, nó đi qua mạch từ trễ vượt 6 để thu được tín hiệu sóng vuông đồng bộ hoàn toàn với tín hiệu đầu vào của lưới điện. Mạch được hiển thị trong hình XNUMX.

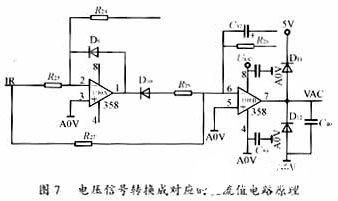
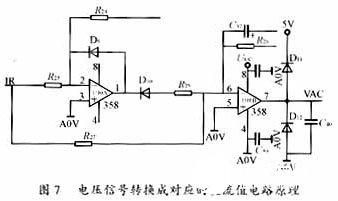
Ngoài ra, việc phát hiện giá trị điện áp đầu vào không phải là giá trị tức thời của điện áp mà là giá trị hiệu dụng, vì vậy mạch chỉnh lưu chính xác trong hình 7 được sử dụng để chuyển đổi tín hiệu điện áp đã lọc thành giá trị DC tương ứng.

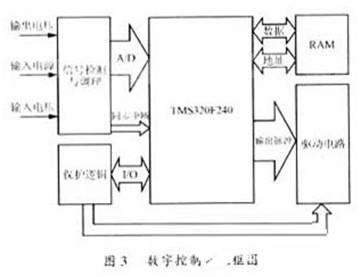
CPU và các mạch ngoại vi của nó chủ yếu bao gồm mạch đồng hồ, mạch đặt lại, v.v. Ngoài ra, để tiện cho việc gỡ lỗi, hệ thống này cũng đã mở rộng chip RAM 16-bit làm bộ nhớ chương trình. Mạch dẫn động có vai trò cải thiện khả năng dẫn động và cách ly xung. Mạch logic bảo vệ đảm bảo rằng khi xảy ra sự cố, hệ thống có thể chặn trực tiếp tín hiệu xung đầu ra từ phần cứng.
5 Thiết kế phần mềm của hệ thống điều khiển
Phần mềm hệ thống điều khiển trong bài viết này chủ yếu bao gồm các phần sau:
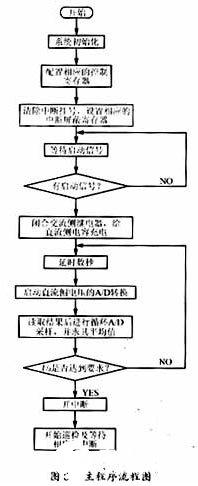
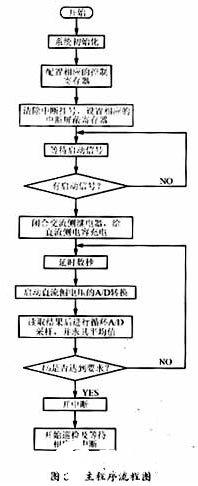
1) Chương trình chính chủ yếu hoàn thành việc khởi tạo hệ thống và phát hiện vòng lặp của từng đại lượng đầu vào trong hệ thống;
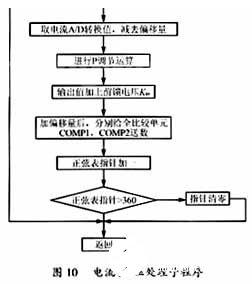
2) Chương trình con xử lý hiện tại chủ yếu hoàn thành việc xử lý dữ liệu của vòng điều khiển hiện tại trong hệ thống điều khiển;
3) Chương trình con xử lý điện áp chủ yếu hoàn thành việc xử lý dữ liệu của vòng điều khiển điện áp trong hệ thống điều khiển;
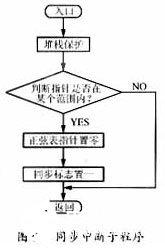
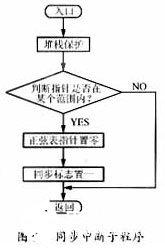
4) Chương trình con ngắt đồng bộ lấy tín hiệu đồng bộ làm nguồn ngắt và đặt cờ đồng bộ để giữ nhịp chạy phần mềm của toàn bộ hệ thống điều khiển phù hợp với điện áp lưới;
5) Chương trình con ngắt bộ định thời. Đây là phần cốt lõi của toàn bộ chương trình, tạo ra các sóng PWM cần thiết theo kết quả của từng phần hoạt động.
Biểu đồ luồng phần mềm được hiển thị trong Hình 8, 9 và 10.



6 Kết quả thực nghiệm
Sử dụng sơ đồ trên, bài báo này đã xây dựng một thiết bị thí nghiệm công suất thấp trong phòng thí nghiệm, và các thông số của từng phần như sau:
Điện áp đầu vào AC 170V
Điện áp đầu ra DC 300V
Công suất đầu ra 360W
Các dạng sóng của từng bộ phận được thể hiện trong Hình 11 và 12.


Kết luận 7
Bộ chỉnh lưu PWM là một loại bộ chuyển đổi công suất mới, có thể làm cho hệ số công suất đầu vào gần bằng 1. Bài báo này áp dụng phương pháp điều khiển theo dõi hiện tại, thiết kế hệ thống điều khiển kỹ thuật số với chip DSP hiệu suất cao TMS320F240 làm lõi và dẫn điện thấp -các thí nghiệm sức mạnh. Cuối cùng, thực nghiệm chứng minh rằng hệ thống điều khiển có ưu điểm là điều khiển linh hoạt, độ chính xác cao, phản ứng động tốt và ít bị can thiệp.
Tác giả: Liu Yanzhu
1 Giới thiệu
Bộ chỉnh lưu PWM là một loại bộ biến đổi công suất mới được phát triển bằng cách áp dụng công nghệ điều chế độ rộng xung. Nguyên tắc cơ bản là làm cho dòng điện đầu vào của bộ chỉnh lưu gần với một sóng sin bằng cách điều khiển trạng thái bật-tắt của ống công tắc nguồn, dòng điện và điện áp ở cùng một pha, do đó loại bỏ hầu hết các sóng hài hiện tại và làm hệ số công suất gần bằng 1. Bài báo này sử dụng TMS320F240DSP của TI để thực hiện điều khiển kỹ thuật số của bộ chỉnh lưu. Phương pháp này có những ưu điểm sau so với điều khiển tương tự:
1) Điều khiển linh hoạt Trong hệ thống điều khiển kỹ thuật số, các thuật toán phần mềm chủ yếu được sử dụng để thực hiện các sơ đồ điều khiển, linh hoạt hơn điều khiển tương tự;
2) Độ tin cậy cao Hệ thống vi máy tính sử dụng ít thành phần hơn và tất cả các tín hiệu đều được xử lý kỹ thuật số, do đó nhiễu nhỏ và độ tin cậy cao;
3) Phân tích lỗi dễ dàng, phát hiện tín hiệu sẽ lưu trữ thông tin thu được, và nó có khả năng ghi nhớ, do đó, dễ dàng nhận ra chẩn đoán lỗi;
4) Cài đặt tham số đơn giản có thể làm cho công việc gỡ lỗi hệ thống rất thuận tiện.
Dựa trên những cân nhắc ở trên, bài viết này sử dụng hệ thống điều khiển kỹ thuật số với DSP làm lõi để điều khiển bộ chỉnh lưu.
2 Tính năng chính của TMS320F240
3 mạch chính chỉnh lưu PWM và sơ đồ điều khiển
Mạch chính trong bài viết này sử dụng cấu trúc toàn cầu một pha, như trong Hình 1.
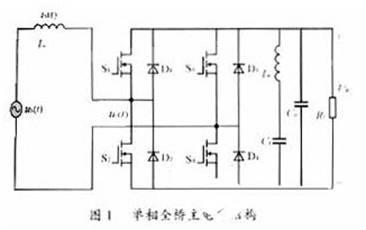
Trong hình, uN
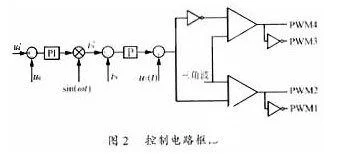
Nguyên tắc điều khiển cụ thể được mô tả ngắn gọn như sau: Độ lệch của giá trị lấy mẫu điện áp đầu ra (ud) và điện áp tham chiếu đã cho (ud *) được gửi đến bộ điều chỉnh PI và giá trị thu được được sử dụng làm biên độ của dòng điện tham chiếu tín hiệu, nhân với cùng pha với điện áp cung cấp điện Sau tín hiệu sin tham chiếu [sin (ωt)], nó được sử dụng làm giá trị của dòng điện tham chiếu. Giá trị lấy mẫu dòng điện đầu vào nhận được từ mạch điện cảm và tín hiệu lỗi dòng điện được gửi đến bộ điều chỉnh tỷ lệ. Giá trị đầu ra được thêm vào với tín hiệu bù điện áp đầu vào [uT
Mạch đơn vị phát hiện và điều hòa dòng điện được trình bày trong Hình 4. Sau khi tín hiệu dòng điện đầu ra của cảm biến dòng điện được biến đổi thành tín hiệu điện áp bởi điện trở đo RM, độ lợi của bộ khuếch đại được tạo bởi bộ khuếch đại hoạt động U8 được xác định bằng giá trị của RM. , để tín hiệu lưỡng cực đầu ra có thể nằm trong phạm vi ± 5V. Bộ khuếch đại hoạt động U9 tạo thành một giai đoạn chuyển đổi phân cực mức, chuyển đổi tín hiệu lưỡng cực thành tín hiệu đơn cực theo tỷ lệ. Tín hiệu 0 ~ + 5V đơn cực được yêu cầu để chuyển đổi DSPA / D và nguồn + 5V được cung cấp bởi bộ nguồn tham chiếu bao gồm LM336. Một bộ lọc thông thấp đơn giản bao gồm RC để lọc ra các sóng hài phụ của tần số chuyển mạch của dòng điện đầu vào AC và hai điốt là điốt kẹp.
Bộ phát hiện và điều chỉnh điện áp đầu ra DC là một cảm biến đầu cuối vòng kín cho điện áp phía DC. Mục đích là để đo điện áp phía tụ điện một chiều. Vì điện áp của tụ điện chứa một gợn sóng nhất định, nó cần phải giới thiệu một liên kết lọc. Nguyên lý mạch được thể hiện trong hình 5.
Tín hiệu điện áp đầu vào AC được sử dụng làm tín hiệu đồng bộ hóa. Do tín hiệu điện áp đầu vào từ lưới điện thường không phải là sóng sin thuần túy, nên nó phải được lọc để phát hiện chính xác pha của điện áp đầu vào lưới điện. Bộ lọc bao gồm một bộ lọc thông thấp và một bộ lọc thông cao. phần. Bộ khuếch đại hoạt động U11A và mạng điện dung kháng ngoại vi tạo thành bộ lọc thông thấp bậc hai. Bộ lọc thông thấp có thể lọc ra các sóng hài bậc cao trong tín hiệu đầu vào của lưới điện, do đó dạng sóng được cải thiện, nhưng pha bị trễ, vì vậy bộ lọc thông cao được đưa vào để bù. U11B và mạng điện trở-tụ điện ngoại vi của nó tạo thành bộ lọc thông cao bậc hai. Từ mạch có thể thấy rằng cấu trúc tôpô của bộ lọc thông cao và thông thấp là hoàn toàn giống nhau, điện trở và điện dung được phân bố đối xứng. Miễn là các tham số khác nhau được chọn một cách thích hợp, pha đầu tiên của bộ lọc thông cao có thể bù đắp cho pha trễ của bộ lọc thông thấp. Sau khi lọc hai lần, không chỉ các sóng hài được lọc ra, dạng sóng gần với sin và không có sự dịch chuyển pha. Sau khi lọc, nó đi qua mạch từ trễ vượt 6 để thu được tín hiệu sóng vuông đồng bộ hoàn toàn với tín hiệu đầu vào của lưới điện. Mạch được hiển thị trong hình XNUMX.
Ngoài ra, việc phát hiện giá trị điện áp đầu vào không phải là giá trị tức thời của điện áp mà là giá trị hiệu dụng, vì vậy mạch chỉnh lưu chính xác trong hình 7 được sử dụng để chuyển đổi tín hiệu điện áp đã lọc thành giá trị DC tương ứng.
CPU và các mạch ngoại vi của nó chủ yếu bao gồm mạch đồng hồ, mạch đặt lại, v.v. Ngoài ra, để tiện cho việc gỡ lỗi, hệ thống này cũng đã mở rộng chip RAM 16-bit làm bộ nhớ chương trình. Mạch dẫn động có vai trò cải thiện khả năng dẫn động và cách ly xung. Mạch logic bảo vệ đảm bảo rằng khi xảy ra sự cố, hệ thống có thể chặn trực tiếp tín hiệu xung đầu ra từ phần cứng.
5 Thiết kế phần mềm của hệ thống điều khiển
Phần mềm hệ thống điều khiển trong bài viết này chủ yếu bao gồm các phần sau:
1) Chương trình chính chủ yếu hoàn thành việc khởi tạo hệ thống và phát hiện vòng lặp của từng đại lượng đầu vào trong hệ thống;
2) Chương trình con xử lý hiện tại chủ yếu hoàn thành việc xử lý dữ liệu của vòng điều khiển hiện tại trong hệ thống điều khiển;
3) Chương trình con xử lý điện áp chủ yếu hoàn thành việc xử lý dữ liệu của vòng điều khiển điện áp trong hệ thống điều khiển;
4) Chương trình con ngắt đồng bộ lấy tín hiệu đồng bộ làm nguồn ngắt và đặt cờ đồng bộ để giữ nhịp hoạt động phần mềm của toàn bộ hệ thống điều khiển phù hợp với điện áp lưới;
5) Chương trình con ngắt bộ định thời. Đây là phần cốt lõi của toàn bộ chương trình, tạo ra các sóng PWM cần thiết theo kết quả của từng phần hoạt động.
Biểu đồ luồng phần mềm được hiển thị trong Hình 8, 9 và 10.

6 Kết quả thực nghiệm
Sử dụng sơ đồ trên, bài báo này đã xây dựng một thiết bị thí nghiệm công suất thấp trong phòng thí nghiệm, và các thông số của từng phần như sau:
Điện áp đầu vào AC 170V
Điện áp đầu ra DC 300V
Công suất đầu ra 360W
Các dạng sóng của từng bộ phận được thể hiện trong Hình 11 và 12.

Kết luận 7
Bộ chỉnh lưu PWM là một loại bộ chuyển đổi công suất mới, có thể làm cho hệ số công suất đầu vào gần bằng 1. Bài báo này áp dụng phương pháp điều khiển theo dõi hiện tại, thiết kế hệ thống điều khiển kỹ thuật số với chip DSP hiệu suất cao TMS320F240 làm lõi và dẫn điện thấp -các thí nghiệm sức mạnh. Cuối cùng, thực nghiệm chứng minh rằng hệ thống điều khiển có ưu điểm là điều khiển linh hoạt, độ chính xác cao, phản ứng động tốt và ít bị can thiệp.
Các liên kết: R0878LS20K LMG6381QHGE