"PWM-Gleichrichter ist eine neue Art von Leistung Konverter entwickelt durch Anwendung der Pulsweitenmodulation Technologie. Das Grundprinzip besteht darin, den Eingangsstrom des Gleichrichters durch Steuerung des Ein-Aus-Zustands der Leistungsschalterröhre und des Stroms einer Sinuswelle anzunähern Spannung sind in der gleichen Phase, wodurch die meisten Stromoberwellen eliminiert werden und der Leistungsfaktor nahe 1 liegt. In diesem Artikel wird der TMS320F240DSP von TI verwendet, um eine digitale Steuerung des Gleichrichters zu implementieren. Dieses Verfahren hat gegenüber der analogen Steuerung die folgenden Vorteile.
"
Autor: Liu Yanzhu
1 Beidhändige Rückhand: Einleitung
PWM-Gleichrichter ist ein neuer Typ von Leistungswandlern, der durch Anwendung der Pulsweitenmodulationstechnologie entwickelt wurde. Das Grundprinzip besteht darin, den Eingangsstrom des Gleichrichters einer Sinuswelle nahe zu bringen, indem der Ein-Aus-Zustand der Leistungsschalterröhre gesteuert wird, und der Strom und die Spannung sind in der gleichen Phase, wodurch die meisten Stromoberschwingungen eliminiert werden der Leistungsfaktor nahe 1. In diesem Artikel wird der TMS320F240DSP von TI verwendet, um eine digitale Steuerung des Gleichrichters zu implementieren. Diese Methode hat gegenüber der analogen Steuerung folgende Vorteile:
1) Flexible Steuerung In digitalen Steuerungssystemen werden hauptsächlich Softwarealgorithmen verwendet, um Steuerungsschemata zu implementieren, die flexibler als die analoge Steuerung sind;
2) Hohe Zuverlässigkeit Das Mikrocomputersystem verwendet weniger Komponenten und alle Signale werden digital verarbeitet, so dass die Störung gering und die Zuverlässigkeit hoch ist;
3) Die Fehleranalyse ist einfach, die Signalerkennung speichert die erhaltenen Informationen und hat die Fähigkeit, sich zu erinnern, so dass eine Fehlerdiagnose leicht zu realisieren ist;
4) Einfache Parametereinstellung kann die System-Debugging-Arbeit sehr bequem machen.
Basierend auf den obigen Überlegungen verwendet dieser Artikel ein digitales Steuerungssystem mit DSP als Kern, um den Gleichrichter zu steuern.
2 Hauptmerkmale des TMS320F240
3 PWM-Gleichrichternetz Schaltung und Kontrollschema
Die Hauptschaltung in diesem Artikel verwendet eine einphasige Vollbrückenstruktur, wie in Abbildung 1 gezeigt.


In der Abbildung ist uN
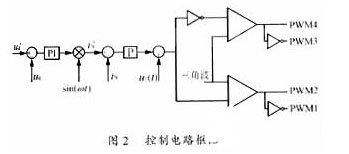

Das konkrete Regelprinzip wird wie folgt kurz beschrieben: Die Abweichung des Ausgangsspannungs-Abtastwerts (ud) von der vorgegebenen Referenzspannung (ud*) wird an den PI gesendet Regler, und der erhaltene Wert wird als Amplitude des Referenzstromsignals verwendet, multipliziert mit der gleichen Phase wie die Versorgungsspannung. Nach dem Referenzsinussignal[sin(ωt)] wird es als Wert des Referenzstroms verwendet. Der Eingangsstrom-Abtastwert wird von der Induktivitätsschaltung erhalten und das Stromfehlersignal wird an den Proportionalregler gesendet. Der Ausgangswert wird mit dem Eingangsspannungskompensationssignal[uT] addiert


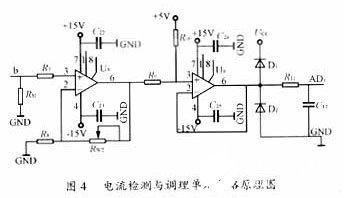
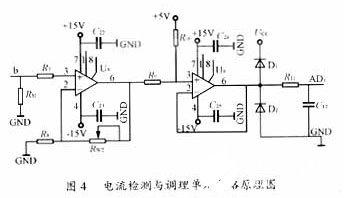
Stromerfassungs- und -aufbereitungseinheit in Abbildung 4 gezeigt. Nach dem Ausgangsstromsignal des Stroms Sensor durch den Messwiderstand RM in ein Spannungssignal umgewandelt wird, wird die Verstärkung des durch den Operationsverstärker U8 gebildeten Verstärkers durch den Wert von RM bestimmt, so dass das bipolare Ausgangssignal in den Bereich von ±5 V fallen kann. Der Operationsverstärker U9 bildet eine Pegel-Polaritäts-Umwandlungsstufe, die das bipolare Signal proportional in ein unipolares Signal umwandelt. Das unipolare 0~+5V-Signal wird für die DSPA/D-Wandlung benötigt und die +5V-Stromversorgung wird von der Referenzstromversorgung bestehend aus LM336 geliefert. Ein einfacher Tiefpassfilter bestehend aus RC zum Herausfiltern der Subharmonischen der Schaltfrequenz des AC-Eingangsstroms, und die beiden Dioden sind Klemmdioden.

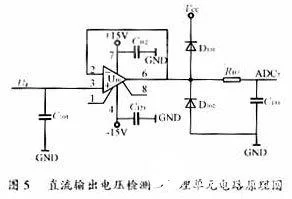
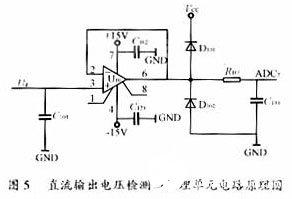
Die DC-Ausgangsspannungserkennungs- und -konditionierungseinheit ist ein Front-End-Sensor mit geschlossenem Regelkreis für die DC-Seitenspannung. Der Zweck besteht darin, die DC-Seite zu messen Kondensator Stromspannung. Da die Kondensatorspannung eine gewisse Welligkeit aufweist, muss eine Filterverbindung eingeführt werden. Das Schaltungsprinzip ist in Abbildung 5 dargestellt.

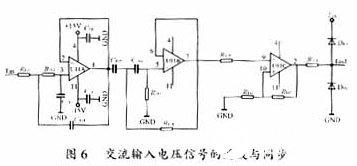
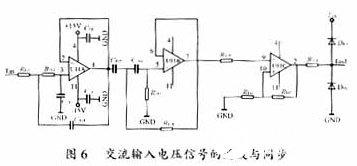
Das AC-Eingangsspannungssignal wird als Synchronisationssignal verwendet. Da das vom Stromnetz eingegebene Spannungssignal häufig keine reine Sinuswelle ist, muss es gefiltert werden, um die Phase der Eingangsspannung des Stromnetzes genau zu erkennen. Der Filter umfasst einen Tiefpassfilter und einen Hochpassfilter. Teil. Der Operationsverstärker U11A und das periphere Widerstands-Kapazitäts-Netzwerk bilden einen Tiefpass zweiter Ordnung. Der Tiefpassfilter kann Oberwellen höherer Ordnung im Eingangssignal des Stromnetzes herausfiltern, sodass die Wellenform verbessert wird, die Phase jedoch nacheilt, sodass zur Kompensation ein Hochpassfilter eingeführt wird. U11B und seine Peripherie Widerstand-Kondensatornetzwerk bilden ein Hochpassfilter zweiter Ordnung. Aus der Schaltung ist ersichtlich, dass der topologische Aufbau von Hochpass und Tiefpass exakt gleich ist und Widerstand und Kapazität symmetrisch verteilt sind. Solange die verschiedenen Parameter geeignet gewählt werden, kann die voreilende Phase des Hochpassfilters die nacheilende Phase des Tiefpassfilters gerade ausgleichen. Nach zweimaligem Filtern werden nicht nur die Oberwellen herausgefiltert, die Wellenform ist nahezu sinusförmig und es gibt keine Phasenverschiebung. Nach der Filterung durchläuft es die Nulldurchgangs-Hystereseschaltung, um ein Rechtecksignal zu erhalten, das vollständig mit dem Eingangssignal des Stromnetzes synchronisiert ist. Die Schaltung ist in Abbildung 6 dargestellt.

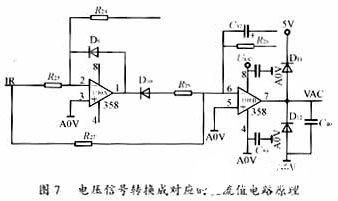
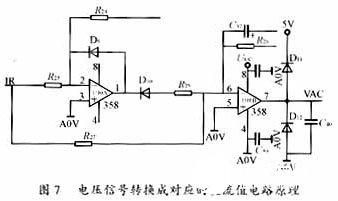
Außerdem ist die Erfassung des Eingangsspannungswerts nicht der Momentanwert der Spannung, sondern der Effektivwert, so dass die in Fig. 7 gezeigte Präzisionsgleichrichterschaltung verwendet wird, um das gefilterte Spannungssignal in den entsprechenden Gleichstromwert umzuwandeln.

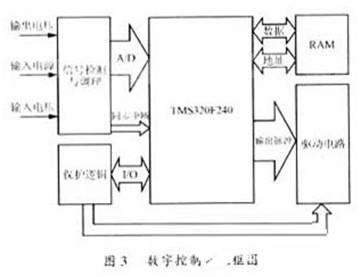
Die CPU und ihre Peripherieschaltungen umfassen hauptsächlich Taktschaltungen, Rücksetzschaltungen und so weiter. Darüber hinaus hat dieses System für das Debugging einen 16-Bit-RAM-Chip als Programmspeicher erweitert. Die Treiberschaltung spielt eine Rolle bei der Verbesserung der Treiberfähigkeit und der Isolierung des Impulses. Die Schutzlogik stellt sicher, dass das System im Fehlerfall das Ausgangsimpulssignal der Hardware direkt blockieren kann.
5 Softwaredesign der Steuerung
Die Steuerungssoftware in diesem Artikel umfasst hauptsächlich die folgenden Teile:
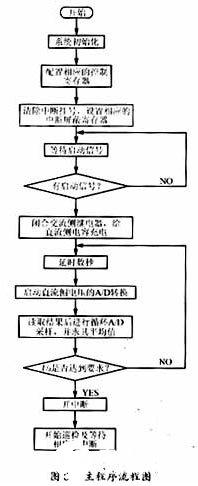
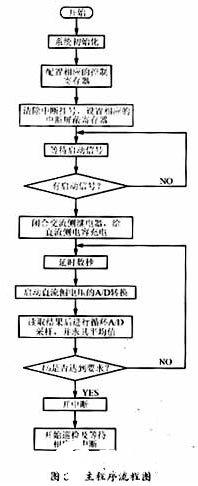
1) Das Hauptprogramm vervollständigt hauptsächlich die Initialisierung des Systems und die Schleifenerkennung jeder Eingangsgröße im System;
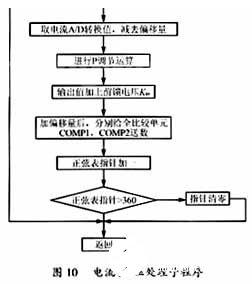
2) Das Stromverarbeitungsunterprogramm vervollständigt hauptsächlich die Datenverarbeitung des Stromregelkreises im Regelsystem;
3) Die Spannungsverarbeitungs-Subroutine vervollständigt hauptsächlich die Datenverarbeitung der Spannungsregelschleife im Regelsystem;
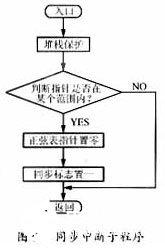
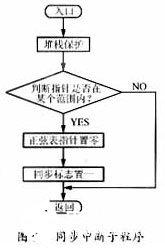
4) Die Synchronisations-Interrupt-Subroutine nimmt das Synchronisationssignal als die Unterbrechungsquelle und setzt das Synchronisations-Flag, um den Software-Laufrhythmus des gesamten Steuersystems konsistent mit der Netzspannung zu halten;
5) Timer-Interrupt-Unterprogramm. Dies ist der Kernteil des gesamten Programms, das die erforderlichen PWM-Wellen entsprechend den Ergebnissen jedes Teils der Operation erzeugt.
Das Software-Flussdiagramm ist in den Abbildungen 8, 9 und 10 dargestellt.



6 Versuchsergebnisse
Unter Verwendung des obigen Schemas wurde in diesem Artikel ein Experimentalgerät mit geringer Leistung im Labor gebaut, und die Parameter jedes Teils sind wie folgt:
Eingangsspannung AC 170V
Ausgangsspannung DC 300V
Ausgangsleistung 360W
Die Wellenformen jedes Teils sind in den Abbildungen 11 und 12 dargestellt.


7 Fazit
Der PWM-Gleichrichter ist ein neuer Typ von Leistungswandler, der den Eingangsleistungsfaktor nahe 1 bringen kann. Dieses Papier verwendet die aktuelle Tracking-Steuerungsmethode, entwirft ein digitales Steuerungssystem mit dem Hochleistungs-DSP-Chip TMS320F240 als Kern und leitet niedrige -Kraft-Experimente. Schließlich beweist der Versuch, dass das Regelsystem die Vorteile flexibler Regelung, hoher Präzision, guter Dynamik und geringer Störeinflüsse hat.
Autor: Liu Yanzhu
1 Beidhändige Rückhand: Einleitung
PWM-Gleichrichter ist ein neuer Typ von Leistungswandlern, der durch Anwendung der Pulsweitenmodulationstechnologie entwickelt wurde. Das Grundprinzip besteht darin, den Eingangsstrom des Gleichrichters einer Sinuswelle nahe zu bringen, indem der Ein-Aus-Zustand der Leistungsschalterröhre gesteuert wird, und der Strom und die Spannung sind in der gleichen Phase, wodurch die meisten Stromoberschwingungen eliminiert werden der Leistungsfaktor nahe 1. In diesem Artikel wird der TMS320F240DSP von TI verwendet, um eine digitale Steuerung des Gleichrichters zu implementieren. Diese Methode hat gegenüber der analogen Steuerung folgende Vorteile:
1) Flexible Steuerung In digitalen Steuerungssystemen werden hauptsächlich Softwarealgorithmen verwendet, um Steuerungsschemata zu implementieren, die flexibler als die analoge Steuerung sind;
2) Hohe Zuverlässigkeit Das Mikrocomputersystem verwendet weniger Komponenten und alle Signale werden digital verarbeitet, so dass die Störung gering und die Zuverlässigkeit hoch ist;
3) Die Fehleranalyse ist einfach, die Signalerkennung speichert die erhaltenen Informationen und hat die Fähigkeit, sich zu erinnern, so dass eine Fehlerdiagnose leicht zu realisieren ist;
4) Einfache Parametereinstellung kann die System-Debugging-Arbeit sehr bequem machen.
Basierend auf den obigen Überlegungen verwendet dieser Artikel ein digitales Steuerungssystem mit DSP als Kern, um den Gleichrichter zu steuern.
2 Hauptmerkmale des TMS320F240
3 Hauptstromkreis und Steuerschema des PWM-Gleichrichters
Die Hauptschaltung in diesem Artikel verwendet eine einphasige Vollbrückenstruktur, wie in Abbildung 1 gezeigt.
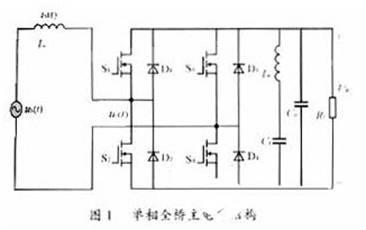
In der Abbildung ist uN
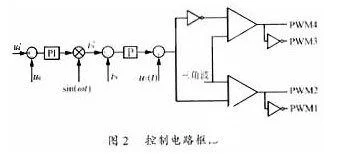
Das spezielle Regelprinzip wird kurz wie folgt beschrieben: Die Abweichung des Ausgangsspannungs-Abtastwertes (ud) und der gegebenen Referenzspannung (ud*) wird an den PI-Regler gesendet und der erhaltene Wert wird als Amplitude des Referenzstroms verwendet Signal, multipliziert mit der gleichen Phase wie die Versorgungsspannung Nach dem Referenzsinussignal [sin(ωt)] wird es als Wert des Referenzstroms verwendet. Der Abtastwert des Eingangsstroms wird von der Induktivitätsschaltung erhalten und das Stromfehlersignal wird an den Proportionalregler gesendet. Der Ausgangswert wird mit dem Eingangsspannungskompensationssignal[uT
Schaltung der Stromerfassungs- und -aufbereitungseinheit in Abbildung 4. Nachdem das Ausgangsstromsignal des Stromsensors durch den Messwiderstand RM in ein Spannungssignal umgewandelt wurde, wird die Verstärkung des vom Operationsverstärker U8 gebildeten Verstärkers durch den Wert von RM . bestimmt , so dass das bipolare Ausgangssignal in den Bereich von ±5V fallen kann. Der Operationsverstärker U9 bildet eine Pegel-Polaritäts-Umwandlungsstufe, die das bipolare Signal proportional in ein unipolares Signal umwandelt. Das unipolare 0~+5V-Signal wird für die DSPA/D-Wandlung benötigt und die +5V-Stromversorgung wird von der Referenzstromversorgung bestehend aus LM336 geliefert. Ein einfacher Tiefpassfilter bestehend aus RC zum Herausfiltern der Subharmonischen der Schaltfrequenz des AC-Eingangsstroms, und die beiden Dioden sind Klemmdioden.
Die DC-Ausgangsspannungserkennungs- und -aufbereitungseinheit ist ein Front-End-Sensor mit geschlossenem Regelkreis für die DC-seitige Spannung. Der Zweck besteht darin, die Kondensatorspannung der DC-Seite zu messen. Da die Kondensatorspannung eine gewisse Welligkeit enthält, muss eine Filterverbindung eingeführt werden. Das Schaltungsprinzip ist in Bild 5 dargestellt.
Das AC-Eingangsspannungssignal wird als Synchronisationssignal verwendet. Da das vom Stromnetz eingegebene Spannungssignal häufig keine reine Sinuswelle ist, muss es gefiltert werden, um die Phase der Eingangsspannung des Stromnetzes genau zu erkennen. Der Filter umfasst einen Tiefpassfilter und einen Hochpassfilter. Teil. Der Operationsverstärker U11A und das periphere Widerstands-Kapazitäts-Netzwerk bilden einen Tiefpass zweiter Ordnung. Der Tiefpassfilter kann Oberwellen höherer Ordnung im Eingangssignal des Stromnetzes herausfiltern, sodass die Wellenform verbessert wird, die Phase jedoch nacheilt, sodass zur Kompensation ein Hochpassfilter eingeführt wird. U11B und sein peripheres Widerstands-Kondensator-Netzwerk bilden einen Hochpassfilter zweiter Ordnung. Aus der Schaltung ist ersichtlich, dass der topologische Aufbau der Hochpass- und Tiefpassfilter exakt gleich ist und Widerstand und Kapazität symmetrisch verteilt sind. Solange die verschiedenen Parameter richtig ausgewählt werden, kann die voreilende Phase des Hochpassfilters die nacheilende Phase des Tiefpassfilters gerade noch ausgleichen. Nach zweimaligem Filtern werden nicht nur die Oberwellen herausgefiltert, die Wellenform liegt nahe am Sinus und es gibt keine Phasenverschiebung. Nach der Filterung durchläuft es die Nulldurchgangs-Hystereseschaltung, um ein Rechtecksignal zu erhalten, das vollständig mit dem Eingangssignal des Stromnetzes synchronisiert ist. Die Schaltung ist in Abbildung 6 dargestellt.
Außerdem ist die Erfassung des Eingangsspannungswerts nicht der Momentanwert der Spannung, sondern der Effektivwert, so dass die in Fig. 7 gezeigte Präzisionsgleichrichterschaltung verwendet wird, um das gefilterte Spannungssignal in den entsprechenden Gleichstromwert umzuwandeln.
Die CPU und ihre Peripherieschaltungen umfassen hauptsächlich Taktschaltungen, Rücksetzschaltungen und so weiter. Darüber hinaus hat dieses System für das Debugging einen 16-Bit-RAM-Chip als Programmspeicher erweitert. Die Treiberschaltung spielt eine Rolle bei der Verbesserung der Treiberfähigkeit und der Isolierung des Impulses. Die Schutzlogik stellt sicher, dass das System im Fehlerfall das Ausgangsimpulssignal der Hardware direkt blockieren kann.
5 Softwaredesign der Steuerung
Die Steuerungssoftware in diesem Artikel umfasst hauptsächlich die folgenden Teile:
1) Das Hauptprogramm vervollständigt hauptsächlich die Initialisierung des Systems und die Schleifenerkennung jeder Eingangsgröße im System;
2) Das Stromverarbeitungsunterprogramm vervollständigt hauptsächlich die Datenverarbeitung des Stromregelkreises im Regelsystem;
3) Die Spannungsverarbeitungs-Subroutine vervollständigt hauptsächlich die Datenverarbeitung der Spannungsregelschleife im Regelsystem;
4) Die Synchronisations-Interrupt-Subroutine nimmt das Synchronisationssignal als die Unterbrechungsquelle und setzt das Synchronisations-Flag, um den Software-Betriebsrhythmus des gesamten Steuersystems konsistent mit der Netzspannung zu halten;
5) Timer-Interrupt-Unterprogramm. Dies ist der Kernteil des gesamten Programms, das die erforderlichen PWM-Wellen entsprechend den Ergebnissen jedes Teils der Operation erzeugt.
Das Software-Flussdiagramm ist in den Abbildungen 8, 9 und 10 dargestellt.

6 Versuchsergebnisse
Unter Verwendung des obigen Schemas wurde in diesem Artikel ein Experimentalgerät mit geringer Leistung im Labor gebaut, und die Parameter jedes Teils sind wie folgt:
Eingangsspannung AC 170V
Ausgangsspannung DC 300V
Ausgangsleistung 360W
Die Wellenformen jedes Teils sind in den Abbildungen 11 und 12 dargestellt.

7 Fazit
Der PWM-Gleichrichter ist ein neuer Typ von Leistungswandler, der den Eingangsleistungsfaktor nahe 1 bringen kann. Dieses Papier verwendet die aktuelle Tracking-Steuerungsmethode, entwirft ein digitales Steuerungssystem mit dem Hochleistungs-DSP-Chip TMS320F240 als Kern und leitet niedrige -Kraft-Experimente. Schließlich beweist der Versuch, dass das Regelsystem die Vorteile flexibler Regelung, hoher Präzision, guter Dynamik und geringer Störeinflüsse hat.
Die Links: R0878LS20K LMG6381QHGE