"El rectificador PWM es un nuevo tipo de potencia convertidor desarrollado aplicando modulación de ancho de pulso la tecnología. El principio básico es acercar la corriente de entrada del rectificador a una onda sinusoidal controlando el estado de encendido y apagado del tubo del interruptor de alimentación, y la corriente y voltaje están en la misma fase, lo que elimina la mayoría de los armónicos de corriente y hace que el factor de potencia se acerque a 1. Este artículo utiliza el TMS320F240DSP de TI para implementar el control digital del rectificador. Este método tiene las siguientes ventajas sobre el control analógico.
"
Autor: Liu Yanzhu
1 Introducción
El rectificador PWM es un nuevo tipo de convertidor de potencia desarrollado mediante la aplicación de tecnología de modulación de ancho de pulso. El principio básico es hacer que la corriente de entrada del rectificador se acerque a una onda sinusoidal controlando el estado de encendido y apagado del tubo del interruptor de alimentación, y la corriente y el voltaje están en la misma fase, eliminando así la mayoría de los armónicos de corriente y haciendo el factor de potencia cercano a 1. Este artículo utiliza el TMS320F240DSP de TI para implementar el control digital del rectificador. Este método tiene las siguientes ventajas sobre el control analógico:
1) Control flexible En los sistemas de control digital, los algoritmos de software se utilizan principalmente para implementar esquemas de control, que son más flexibles que el control analógico;
2) Alta confiabilidad El sistema de microcomputadoras utiliza menos componentes y todas las señales se procesan digitalmente, por lo que la interferencia es pequeña y la confiabilidad es alta;
3) El análisis de fallas es fácil, la detección de señales almacenará la información obtenida y tiene la capacidad de recordar, por lo que es fácil realizar el diagnóstico de fallas;
4) La configuración simple de parámetros puede hacer que la depuración del sistema funcione de manera muy conveniente.
Con base en las consideraciones anteriores, este artículo utiliza un sistema de control digital con DSP como núcleo para controlar el rectificador.
2 Características principales de TMS320F240
Rectificador principal 3 PWM circuito y esquema de control
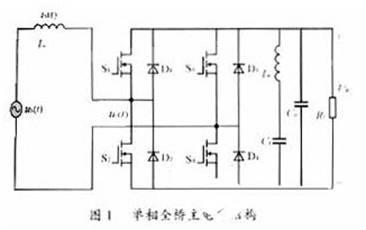
El circuito principal de este artículo adopta una estructura de puente completo monofásico, como se muestra en la Figura 1.


En la figura, uN
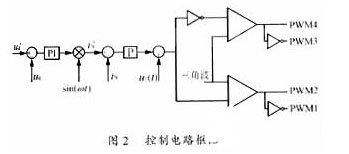

El principio de control específico se describe brevemente de la siguiente manera: La desviación del valor de muestreo de la tensión de salida (ud) y la tensión de referencia dada (ud*) se envía al PI. organismo regulador, y el valor obtenido se usa como la amplitud de la señal de corriente de referencia, multiplicada por la misma fase que el voltaje de la fuente de alimentación. Después de la señal sinusoidal de referencia [sin (ωt)] se usa como el valor de la corriente de referencia. El valor de muestreo de la corriente de entrada se obtiene del circuito de inductancia y la señal de error de corriente se envía al regulador proporcional. El valor de salida se suma con la señal de compensación de voltaje de entrada[uT


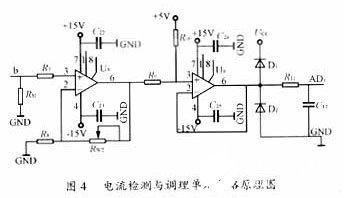
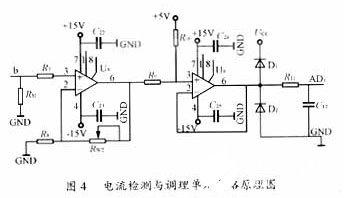
Circuito de la unidad de acondicionamiento y detección de corriente que se muestra en la Figura 4. Después de la señal de corriente de salida de la corriente sensor se convierte en una señal de voltaje por la resistencia de medición RM, la ganancia del amplificador formado por el amplificador operacional U8 está determinada por el valor de RM, de modo que la señal bipolar de salida puede caer dentro del rango de ± 5V. El amplificador operacional U9 constituye una etapa de conversión de polaridad de nivel, que convierte la señal bipolar en una señal unipolar en proporción. La señal unipolar 0 ~ + 5V es necesaria para la conversión DSPA / D, y la fuente de alimentación de + 5V es suministrada por la fuente de alimentación de referencia compuesta por LM336. Un filtro de paso bajo simple compuesto de RC para filtrar los subarmónicos de la frecuencia de conmutación de la corriente de entrada de CA, y los dos diodos son diodos de sujeción.

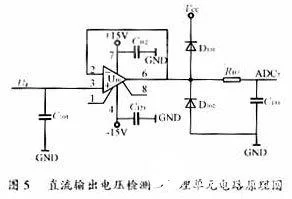
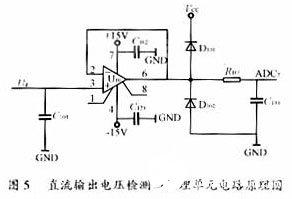
La unidad de acondicionamiento y detección de voltaje de salida de CC es un sensor frontal de circuito cerrado para el voltaje del lado de CC. El propósito es medir el lado DC. condensador Voltaje. Dado que el voltaje del capacitor contiene una cierta ondulación, es necesario introducir un enlace de filtrado. El principio del circuito se muestra en la Figura 5.

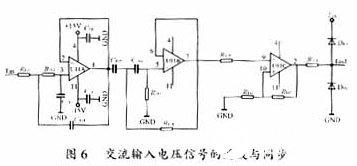
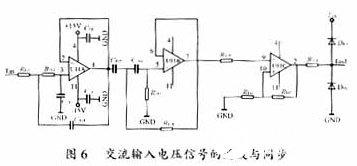
La señal de voltaje de entrada de CA se utiliza como señal de sincronización. Dado que la entrada de señal de voltaje de la red eléctrica a menudo no es una onda sinusoidal pura, debe filtrarse para detectar con precisión la fase del voltaje de entrada de la red eléctrica. El filtro incluye un filtro de paso bajo y un filtro de paso alto. parte. El amplificador operacional U11A y la red de resistencia-capacitancia periférica forman un filtro de paso bajo de segundo orden. El filtro de paso bajo puede filtrar los armónicos de orden alto en la señal de entrada de la red eléctrica, de modo que la forma de onda se mejora, pero la fase está retrasada, por lo que se introduce un filtro de paso alto para la compensación. U11B y su periférico Resistencia-La red de condensadores forma un filtro de paso alto de segundo orden. Se puede ver en el circuito que la estructura topológica de los filtros de paso alto y paso bajo es exactamente la misma, y la resistencia y capacitancia están distribuidas simétricamente. Siempre que los diversos parámetros se seleccionen adecuadamente, la fase inicial del filtro de paso alto puede simplemente compensar la fase de retraso del filtro de paso bajo. Después de filtrar dos veces, no solo se filtran los armónicos, la forma de onda está cerca del seno y no hay cambio de fase. Después de filtrar, pasa por el circuito de histéresis de cruce por cero para obtener una señal de onda cuadrada que está completamente sincronizada con la señal de entrada de la red eléctrica. El circuito se muestra en la Figura 6.

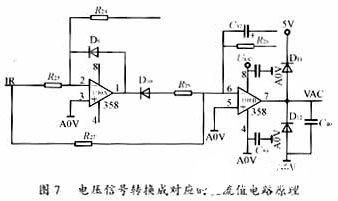
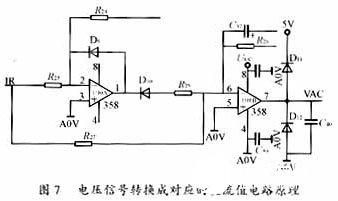
Además, la detección del valor de la tensión de entrada no es el valor instantáneo de la tensión sino el valor efectivo, por lo que el circuito rectificador de precisión que se muestra en la figura 7 se utiliza para convertir la señal de tensión filtrada en el valor de CC correspondiente.

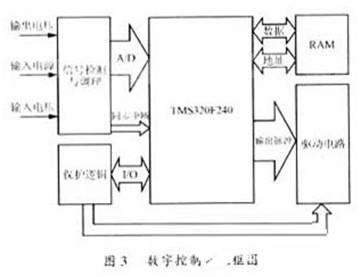
La CPU y sus circuitos periféricos incluyen principalmente circuitos de reloj, circuitos de reinicio, etc. Además, para facilitar la depuración, este sistema también ha ampliado un chip RAM de 16 bits como memoria de programa. El circuito de conducción juega un papel en la mejora de la capacidad de conducción y el aislamiento del pulso. El circuito lógico de protección asegura que cuando ocurre una falla, el sistema puede bloquear directamente la señal de pulso de salida del hardware.
5 Diseño de software del sistema de control
El software del sistema de control de este artículo incluye principalmente las siguientes partes:
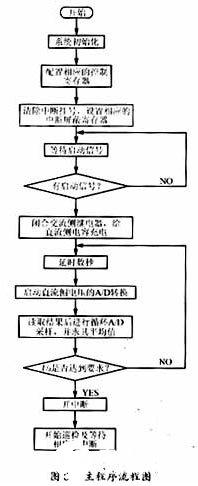
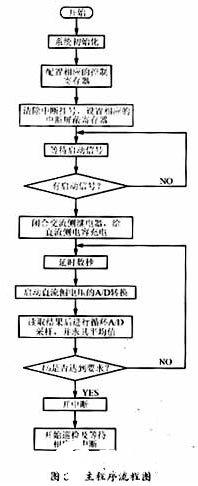
1) El programa principal completa principalmente la inicialización del sistema y la detección de bucle de cada cantidad de entrada en el sistema;
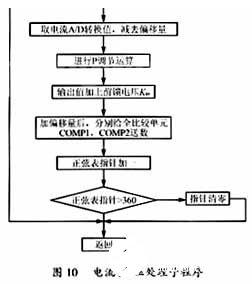
2) La subrutina de procesamiento actual completa principalmente el procesamiento de datos del bucle de control actual en el sistema de control;
3) La subrutina de procesamiento de voltaje completa principalmente el procesamiento de datos del lazo de control de voltaje en el sistema de control;
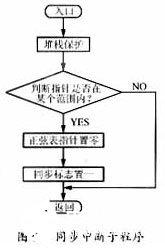
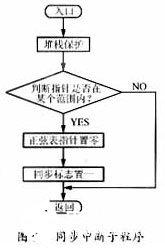
4) La subrutina de interrupción de sincronización toma la señal de sincronización como fuente de interrupción y establece la bandera de sincronización para mantener el ritmo de ejecución del software de todo el sistema de control consistente con el voltaje de la red;
5) Subrutina de interrupción del temporizador. Esta es la parte central de todo el programa, que genera las ondas PWM requeridas de acuerdo con los resultados de cada parte de la operación.
El diagrama de flujo del software se muestra en las Figuras 8, 9 y 10.



6 Resultados experimentales
Utilizando el esquema anterior, este artículo construyó un dispositivo experimental de baja potencia en el laboratorio, y los parámetros de cada parte son los siguientes:
Voltaje de entrada AC 170V
Voltaje de salida DC 300V
Potencia de salida 360W
Las formas de onda de cada parte se muestran en las Figuras 11 y 12.


Conclusión 7
El rectificador PWM es un nuevo tipo de convertidor de potencia, que puede hacer que el factor de potencia de entrada se acerque a 1. Este documento adopta el método de control de seguimiento actual, diseña un sistema de control digital con el chip DSP de alto rendimiento TMS320F240 como núcleo y conduce bajo -Experimentos de potencia. Finalmente, el experimento demuestra que el sistema de control tiene las ventajas de un control flexible, alta precisión, buena respuesta dinámica y poca interferencia.
Autor: Liu Yanzhu
1 Introducción
El rectificador PWM es un nuevo tipo de convertidor de potencia desarrollado mediante la aplicación de tecnología de modulación de ancho de pulso. El principio básico es hacer que la corriente de entrada del rectificador se acerque a una onda sinusoidal controlando el estado de encendido y apagado del tubo del interruptor de alimentación, y la corriente y el voltaje están en la misma fase, eliminando así la mayoría de los armónicos de corriente y haciendo el factor de potencia cercano a 1. Este artículo utiliza el TMS320F240DSP de TI para implementar el control digital del rectificador. Este método tiene las siguientes ventajas sobre el control analógico:
1) Control flexible En los sistemas de control digital, los algoritmos de software se utilizan principalmente para implementar esquemas de control, que son más flexibles que el control analógico;
2) Alta confiabilidad El sistema de microcomputadoras utiliza menos componentes y todas las señales se procesan digitalmente, por lo que la interferencia es pequeña y la confiabilidad es alta;
3) El análisis de fallas es fácil, la detección de señales almacenará la información obtenida y tiene la capacidad de recordar, por lo que es fácil realizar el diagnóstico de fallas;
4) La configuración simple de parámetros puede hacer que la depuración del sistema funcione de manera muy conveniente.
Con base en las consideraciones anteriores, este artículo utiliza un sistema de control digital con DSP como núcleo para controlar el rectificador.
2 Características principales de TMS320F240
Esquema de control y circuito principal del rectificador 3 PWM
El circuito principal de este artículo adopta una estructura de puente completo monofásico, como se muestra en la Figura 1.
En la figura, uN
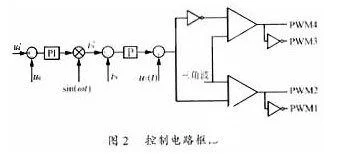
El principio de control específico se describe brevemente de la siguiente manera: La desviación del valor de muestreo del voltaje de salida (ud) y el voltaje de referencia dado (ud *) se envía al regulador PI, y el valor obtenido se usa como la amplitud de la corriente de referencia. señal, multiplicada por la misma fase que la tensión de alimentación Después de la señal sinusoidal de referencia [sin (ωt)] se utiliza como valor de la corriente de referencia. El valor de muestreo de la corriente de entrada se obtiene del circuito de inductancia y la señal de error de corriente se envía al regulador proporcional. El valor de salida se suma con la señal de compensación de voltaje de entrada [uT
Circuito de la unidad de acondicionamiento y detección de corriente que se muestra en la Figura 4. Después de que la señal de corriente de salida del sensor de corriente se convierte en una señal de voltaje mediante la resistencia de medición RM, la ganancia del amplificador formado por el amplificador operacional U8 se determina mediante el valor de RM , de modo que la señal bipolar de salida pueda caer dentro del rango de ± 5V. El amplificador operacional U9 constituye una etapa de conversión de polaridad de nivel, que convierte la señal bipolar en una señal unipolar en proporción. La señal unipolar 0 ~ + 5V es necesaria para la conversión DSPA / D, y la fuente de alimentación de + 5V es suministrada por la fuente de alimentación de referencia compuesta por LM336. Un filtro de paso bajo simple compuesto de RC para filtrar los subarmónicos de la frecuencia de conmutación de la corriente de entrada de CA, y los dos diodos son diodos de sujeción.
La unidad de acondicionamiento y detección de voltaje de salida de CC es un sensor frontal de circuito cerrado para el voltaje del lado de CC. El propósito es medir la tensión del condensador del lado de CC. Dado que el voltaje del capacitor contiene una cierta ondulación, es necesario introducir un enlace de filtrado. El principio del circuito se muestra en la Figura 5.
La señal de voltaje de entrada de CA se utiliza como señal de sincronización. Dado que la entrada de señal de voltaje de la red eléctrica a menudo no es una onda sinusoidal pura, debe filtrarse para detectar con precisión la fase del voltaje de entrada de la red eléctrica. El filtro incluye un filtro de paso bajo y un filtro de paso alto. parte. El amplificador operacional U11A y la red de resistencia-capacitancia periférica forman un filtro de paso bajo de segundo orden. El filtro de paso bajo puede filtrar los armónicos de orden alto en la señal de entrada de la red eléctrica, de modo que la forma de onda se mejora, pero la fase está retrasada, por lo que se introduce un filtro de paso alto para la compensación. U11B y su red periférica de condensadores y resistencias forman un filtro de paso alto de segundo orden. Se puede ver en el circuito que la estructura topológica de los filtros de paso alto y paso bajo es exactamente la misma, y la resistencia y capacitancia están distribuidas simétricamente. Siempre que los diversos parámetros se seleccionen adecuadamente, la fase inicial del filtro de paso alto puede simplemente compensar la fase de retraso del filtro de paso bajo. Después de filtrar dos veces, no solo se filtran los armónicos, la forma de onda está cerca del seno y no hay cambio de fase. Después de filtrar, pasa por el circuito de histéresis de cruce por cero para obtener una señal de onda cuadrada que está completamente sincronizada con la señal de entrada de la red eléctrica. El circuito se muestra en la Figura 6.
Además, la detección del valor de la tensión de entrada no es el valor instantáneo de la tensión sino el valor efectivo, por lo que el circuito rectificador de precisión que se muestra en la figura 7 se utiliza para convertir la señal de tensión filtrada en el valor de CC correspondiente.
La CPU y sus circuitos periféricos incluyen principalmente circuitos de reloj, circuitos de reinicio, etc. Además, para facilitar la depuración, este sistema también ha ampliado un chip RAM de 16 bits como memoria de programa. El circuito de conducción juega un papel en la mejora de la capacidad de conducción y el aislamiento del pulso. El circuito lógico de protección asegura que cuando ocurre una falla, el sistema puede bloquear directamente la señal de pulso de salida del hardware.
5 Diseño de software del sistema de control
El software del sistema de control de este artículo incluye principalmente las siguientes partes:
1) El programa principal completa principalmente la inicialización del sistema y la detección de bucle de cada cantidad de entrada en el sistema;
2) La subrutina de procesamiento actual completa principalmente el procesamiento de datos del bucle de control actual en el sistema de control;
3) La subrutina de procesamiento de voltaje completa principalmente el procesamiento de datos del lazo de control de voltaje en el sistema de control;
4) La subrutina de interrupción de sincronización toma la señal de sincronización como fuente de interrupción y establece la bandera de sincronización para mantener el ritmo de operación del software de todo el sistema de control consistente con el voltaje de la red;
5) Subrutina de interrupción del temporizador. Esta es la parte central de todo el programa, que genera las ondas PWM requeridas de acuerdo con los resultados de cada parte de la operación.
El diagrama de flujo del software se muestra en las Figuras 8, 9 y 10.

6 Resultados experimentales
Utilizando el esquema anterior, este artículo construyó un dispositivo experimental de baja potencia en el laboratorio, y los parámetros de cada parte son los siguientes:
Voltaje de entrada AC 170V
Voltaje de salida DC 300V
Potencia de salida 360W
Las formas de onda de cada parte se muestran en las Figuras 11 y 12.

Conclusión 7
El rectificador PWM es un nuevo tipo de convertidor de potencia, que puede hacer que el factor de potencia de entrada se acerque a 1. Este documento adopta el método de control de seguimiento actual, diseña un sistema de control digital con el chip DSP de alto rendimiento TMS320F240 como núcleo y conduce bajo -Experimentos de potencia. Finalmente, el experimento demuestra que el sistema de control tiene las ventajas de un control flexible, alta precisión, buena respuesta dinámica y poca interferencia.
Los enlaces: R0878LS20K LMG6381QHGE