「PWM整流器は新しいタイプの電力です コンバータ パルス幅変調を適用して開発 テクノロジー。 基本原理は、電源スイッチ管のオンオフ状態を制御し、電流と電流を制御することにより、整流器の入力電流を正弦波に近づけることです。 電圧 は同相であるため、現在の高調波のほとんどが除去され、力率が1に近くなります。この記事では、TIのTMS320F240DSPを使用して、整流器のデジタル制御を実装します。 この方法には、アナログ制御に比べて次のような利点があります。
「
著者:劉Yanzhu
1はじめに
PWM整流器は、パルス幅変調技術を適用して開発された新しいタイプの電力変換器です。 基本的な原理は、電源スイッチチューブのオンオフ状態を制御することによって整流器の入力電流を正弦波に近づけることであり、電流と電圧は同相であり、それによって電流高調波のほとんどを排除し、力率は1に近いです。この記事では、TIのTMS320F240DSPを使用して、整流器のデジタル制御を実装します。 この方法には、アナログ制御に比べて次の利点があります。
1)柔軟な制御デジタル制御システムでは、ソフトウェアアルゴリズムは主に、アナログ制御よりも柔軟な制御スキームを実装するために使用されます。
2)信頼性の高さマイクロコンピュータシステムは使用する部品が少なく、すべての信号がデジタル処理されるため、干渉が少なく、信頼性が高くなります。
3)故障解析が容易で、信号検出により得られた情報が保存され、記憶できるため、故障診断が容易に実現できます。
4)簡単なパラメータ設定により、システムのデバッグ作業が非常に便利になります。
上記の考慮事項に基づいて、この記事では、整流器を制御するためのコアとしてDSPを備えたデジタル制御システムを使用します。
2TMS320F240の主な機能
3PWM整流器メイン 回路 および制御方式
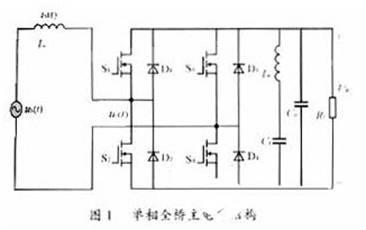
この記事の主回路は、図1に示すように、単相フルブリッジ構造を採用しています。


図では、uN
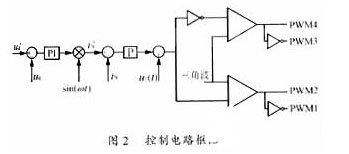

具体的な制御原理は次のように簡単に説明されます。 出力電圧サンプリング値 (ud) と指定された基準電圧 (ud*) の偏差が PI に送信されます。 レギュレーター、得られた値を基準電流信号の振幅とし、電源電圧と同位相を乗じた基準正弦波信号[sin(ωt)]を基準電流の値として使用します。 入力電流サンプリング値はインダクタンス回路から得られ、電流誤差信号が比例調整器に送られます。 出力値は入力電圧補償信号[uT]と加算されます。


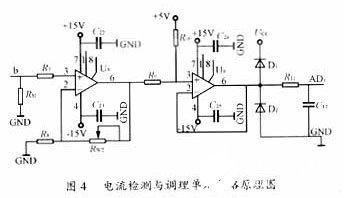
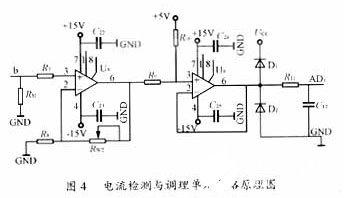
図4に示す電流検出および調整ユニット回路。電流の出力電流信号の後 センサー は測定抵抗RMによって電圧信号に変換され、オペアンプU8によって形成される増幅器のゲインはRMの値によって決定されるため、出力バイポーラ信号は±5Vの範囲内に収まります。 オペアンプU9は、バイポーラ信号を比例してユニポーラ信号に変換するレベル極性変換ステージを構成します。 DSPA / D変換にはユニポーラ0〜 + 5V信号が必要であり、+ 5V電源はLM336で構成される基準電源から供給されます。 AC入力電流のスイッチング周波数の分数調波を除去するためのRCで構成された単純なローパスフィルター。XNUMXつのダイオードはクランプダイオードです。

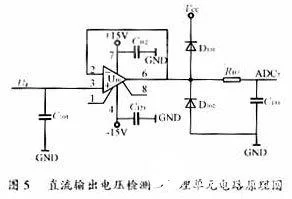
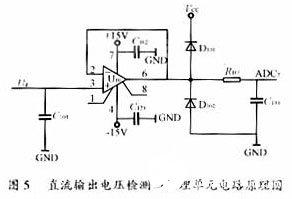
DC 出力電圧検出および調整ユニットは、DC 側電圧の閉ループ フロントエンド センサーです。目的はDC側を測定することです コンデンサ 電圧。コンデンサの電圧には特定のリップルが含まれるため、フィルタリングリンクを導入する必要があります。回路原理を図 5 に示します。

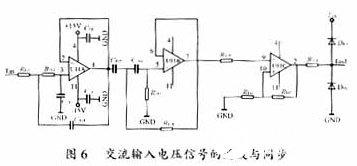
AC入力電圧信号は同期信号として使用されます。 電力網から入力される電圧信号は純粋な正弦波ではないことが多いため、電力網入力電圧の位相を正確に検出するにはフィルタリングする必要があります。 フィルタには、ローパスフィルタとハイパスフィルタが含まれる。 部。 オペアンプ U11A と周辺の抵抗-容量ネットワークは 11 次のローパス フィルターを形成します。 ローパス フィルターは電力網の入力信号の高次高調波を除去できるため、波形は改善されますが、位相が遅れているため、補償のためにハイパス フィルターが導入されます。 UXNUMXBとその周辺機器 抵抗-コンデンサネットワークは、6次ハイパスフィルタを形成します。 回路から、ハイパスフィルターとローパスフィルターのトポロジー構造はまったく同じであり、抵抗と容量が対称的に分布していることがわかります。 さまざまなパラメーターが適切に選択されている限り、ハイパスフィルターの先行位相はローパスフィルターの遅延位相を相殺することができます。 XNUMX回フィルタリングした後、高調波がフィルタリングされるだけでなく、波形は正弦に近くなり、位相シフトはありません。 フィルタリング後、ゼロ交差ヒステリシス回路を通過して、電力網の入力信号と完全に同期した方形波信号を取得します。 回路を図XNUMXに示します。
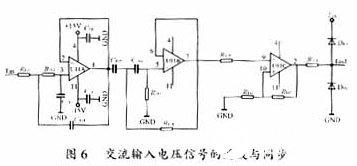

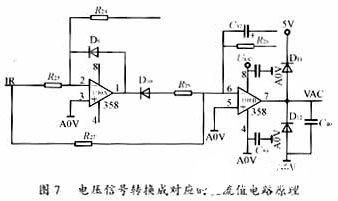
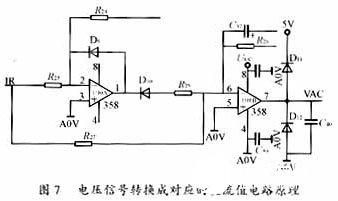
また、入力電圧値の検出は電圧の瞬時値ではなく実効値であるため、図7に示す高精度整流回路を使用して、フィルタリングされた電圧信号を対応するDC値に変換します。

CPUとその周辺回路には、主にクロック回路やリセット回路などが含まれます。 さらに、デバッグの便宜のために、このシステムはプログラムメモリとして16ビットRAMチップも拡張しました。 駆動回路は、駆動能力とパルスの分離を改善する役割を果たします。 保護論理回路は、障害が発生したときに、システムがハードウェアからの出力パルス信号を直接ブロックできることを保証します。
5制御システムのソフトウェア設計
この記事の制御システムソフトウェアには、主に次の部分が含まれています。
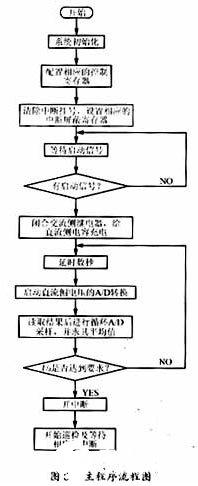
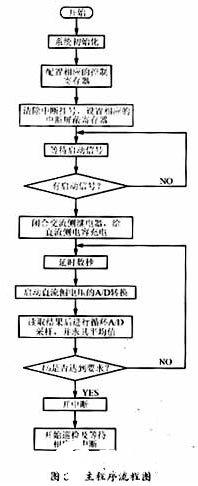
1)メインプログラムは、主にシステムの初期化とシステム内の各入力量のループ検出を完了します。
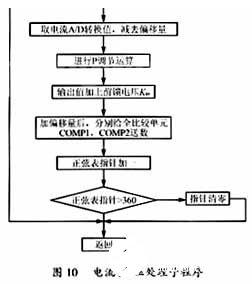
2)電流処理サブルーチンは、主に制御システムの電流制御ループのデータ処理を完了します。
3)電圧処理サブルーチンは、主に制御システムの電圧制御ループのデータ処理を完了します。
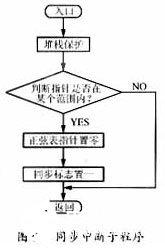
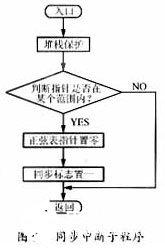
4)同期割り込みサブルーチンは、同期信号を割り込みソースとして受け取り、同期フラグを設定して、制御システム全体のソフトウェア実行リズムをグリッド電圧と一致させます。
5)タイマー割り込みサブルーチン。 これはプログラム全体の中核部分であり、操作の各部分の結果に応じて必要なPWM波を生成します。
ソフトウェアのフローチャートを図8、9、および10に示します。



6実験結果
上記のスキームを使用して、この記事では実験室で低電力の実験装置を構築しました。各部品のパラメータは次のとおりです。
入力電圧AC170V
出力電圧DC300V
出力電力360W
各部の波形を図11と図12に示します。


7まとめ
PWM整流器は、入力力率を1に近づけることができる新しいタイプの電力変換器です。この論文では、電流追跡制御方式を採用し、高性能DSPチップTMS320F240をコアとしてデジタル制御システムを設計し、低導通を実現します。 -パワー実験。 最後に、実験は、制御システムが柔軟な制御、高精度、優れた動的応答、および干渉が少ないという利点を持っていることを証明しています。
著者:劉Yanzhu
1はじめに
PWM整流器は、パルス幅変調技術を適用して開発された新しいタイプの電力変換器です。 基本的な原理は、電源スイッチチューブのオンオフ状態を制御することによって整流器の入力電流を正弦波に近づけることであり、電流と電圧は同相であり、それによって電流高調波のほとんどを排除し、力率は1に近いです。この記事では、TIのTMS320F240DSPを使用して、整流器のデジタル制御を実装します。 この方法には、アナログ制御に比べて次の利点があります。
1)柔軟な制御デジタル制御システムでは、ソフトウェアアルゴリズムは主に、アナログ制御よりも柔軟な制御スキームを実装するために使用されます。
2)信頼性の高さマイクロコンピュータシステムは使用する部品が少なく、すべての信号がデジタル処理されるため、干渉が少なく、信頼性が高くなります。
3)故障解析が容易で、信号検出により得られた情報が保存され、記憶できるため、故障診断が容易に実現できます。
4)簡単なパラメータ設定により、システムのデバッグ作業が非常に便利になります。
上記の考慮事項に基づいて、この記事では、整流器を制御するためのコアとしてDSPを備えたデジタル制御システムを使用します。
2TMS320F240の主な機能
3PWM整流器の主回路と制御方式
この記事の主回路は、図1に示すように、単相フルブリッジ構造を採用しています。
図では、uN
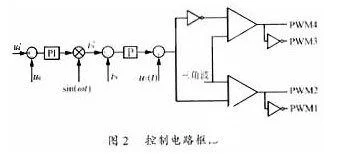
具体的な制御原理を簡単に説明します。出力電圧のサンプリング値(ud)と与えられた基準電圧(ud *)の偏差がPIレギュレータに送信され、得られた値が基準電流の振幅として使用されます。信号に電源電圧と同じ位相を掛けたもの基準正弦波信号[sin(ωt)]の後、基準電流の値として使用されます。 入力電流サンプリング値はインダクタンス回路から取得され、電流エラー信号は比例レギュレータに送信されます。 出力値は入力電圧補償信号[uT
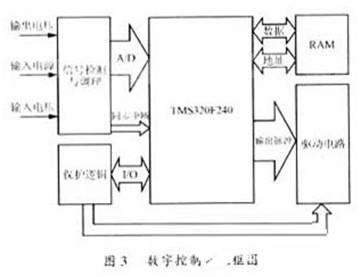
図4に示す電流検出および調整ユニット回路。電流センサーの出力電流信号が測定抵抗RMによって電圧信号に変換された後、動作アンプU8によって形成されるアンプのゲインはRMの値によって決定されます。 、出力バイポーラ信号が±5Vの範囲内に収まるようにします。 オペアンプU9は、バイポーラ信号を比例してユニポーラ信号に変換するレベル極性変換ステージを構成します。 DSPA / D変換にはユニポーラ0〜 + 5V信号が必要であり、+ 5V電源はLM336で構成される基準電源から供給されます。 AC入力電流のスイッチング周波数の分数調波を除去するためのRCで構成された単純なローパスフィルター。XNUMXつのダイオードはクランプダイオードです。
DC出力電圧検出および調整ユニットは、DC側電圧用の閉ループフロントエンドセンサーです。 目的は、DC側のコンデンサ電圧を測定することです。 コンデンサの電圧には一定のリップルが含まれているため、フィルタリングリンクを導入する必要があります。 回路原理を図5に示します。
AC入力電圧信号は同期信号として使用されます。 電力網から入力される電圧信号は純粋な正弦波ではないことが多いため、電力網入力電圧の位相を正確に検出するにはフィルタリングする必要があります。 フィルタには、ローパスフィルタとハイパスフィルタが含まれる。 部。 オペアンプ U11A と周辺の抵抗-容量ネットワークは 11 次のローパス フィルターを形成します。 ローパス フィルターは電力網の入力信号の高次高調波を除去できるため、波形は改善されますが、位相が遅れているため、補償のためにハイパス フィルターが導入されます。 U6B とその周辺の抵抗器とコンデンサーのネットワークは、XNUMX 次のハイパス フィルターを形成します。 この回路から、ハイパス フィルターとローパス フィルターのトポロジー構造はまったく同じで、抵抗と容量が対称的に分布していることがわかります。 さまざまなパラメーターが適切に選択されている限り、ハイパス フィルターの進み位相はローパス フィルターの遅れ位相を相殺することができます。 XNUMX 回フィルタリングすると、高調波が除去されるだけでなく、波形は正弦波に近くなり、位相シフトはなくなります。 フィルタリング後、ゼロクロス ヒステリシス回路を通過して、電力網の入力信号と完全に同期した方形波信号が得られます。 回路を図 XNUMX に示します。
また、入力電圧値の検出は電圧の瞬時値ではなく実効値であるため、図7に示す高精度整流回路を使用して、フィルタリングされた電圧信号を対応するDC値に変換します。
CPUとその周辺回路には、主にクロック回路やリセット回路などが含まれます。 さらに、デバッグの便宜のために、このシステムはプログラムメモリとして16ビットRAMチップも拡張しました。 駆動回路は、駆動能力とパルスの分離を改善する役割を果たします。 保護論理回路は、障害が発生したときに、システムがハードウェアからの出力パルス信号を直接ブロックできることを保証します。
5制御システムのソフトウェア設計
この記事の制御システムソフトウェアには、主に次の部分が含まれています。
1)メインプログラムは、主にシステムの初期化とシステム内の各入力量のループ検出を完了します。
2)電流処理サブルーチンは、主に制御システムの電流制御ループのデータ処理を完了します。
3)電圧処理サブルーチンは、主に制御システムの電圧制御ループのデータ処理を完了します。
4)同期割り込みサブルーチンは、同期信号を割り込みソースとして受け取り、同期フラグを設定して、制御システム全体のソフトウェア動作リズムをグリッド電圧と一致させます。
5)タイマー割り込みサブルーチン。 これはプログラム全体の中核部分であり、操作の各部分の結果に応じて必要なPWM波を生成します。
ソフトウェアのフローチャートを図8、9、および10に示します。

6実験結果
上記のスキームを使用して、この記事では実験室で低電力の実験装置を構築しました。各部品のパラメータは次のとおりです。
入力電圧AC170V
出力電圧DC300V
出力電力360W
各部の波形を図11と図12に示します。

7まとめ
PWM整流器は、入力力率を1に近づけることができる新しいタイプの電力変換器です。この論文では、電流追跡制御方式を採用し、高性能DSPチップTMS320F240をコアとしてデジタル制御システムを設計し、低導通を実現します。 -パワー実験。 最後に、実験は、制御システムが柔軟な制御、高精度、優れた動的応答、および干渉が少ないという利点を持っていることを証明しています。
リンク: R0878LS20K LMG6381QHGE