"PWM 정류기는 새로운 유형의 전원입니다. 변환기 펄스 폭 변조를 적용하여 개발 technology. 기본 원리는 전원 스위치 튜브의 온-오프 상태를 제어하여 정류기의 입력 전류를 사인파에 가깝게 만들고 전류와 전압 동일한 위상에 있으므로 대부분의 전류 고조파를 제거하고 역률을 1에 가깝게 만듭니다. 이 기사에서는 TI의 TMS320F240DSP를 사용하여 정류기의 디지털 제어를 구현합니다. 이 방법은 아날로그 제어에 비해 다음과 같은 장점이 있습니다.
"
저자: 류옌주
1 소개
PWM 정류기는 펄스 폭 변조 기술을 적용하여 개발된 새로운 유형의 전력 변환기입니다. 기본 원리는 전원스위치관의 온-오프 상태를 제어하여 정류기의 입력전류를 정현파에 가깝게 하는 것으로 전류와 전압이 같은 위상에 있으므로 전류 고조파의 대부분을 제거하고 1에 가까운 역률. 이 기사에서는 TI의 TMS320F240DSP를 사용하여 정류기의 디지털 제어를 구현합니다. 이 방법은 아날로그 제어에 비해 다음과 같은 장점이 있습니다.
1) 유연한 제어 디지털 제어 시스템에서 소프트웨어 알고리즘은 주로 아날로그 제어보다 유연한 제어 체계를 구현하는 데 사용됩니다.
2) 높은 신뢰성 마이크로 컴퓨터 시스템은 더 적은 수의 부품을 사용하고 모든 신호가 디지털 방식으로 처리되므로 간섭이 적고 신뢰성이 높습니다.
3) 오류 분석이 쉽고 신호 감지가 획득한 정보를 저장하며 기억하는 기능이 있으므로 오류 진단을 쉽게 실현할 수 있습니다.
4) 간단한 파라미터 설정으로 시스템 디버깅 작업이 매우 편리합니다.
위의 고려 사항을 기반으로 이 기사에서는 DSP를 코어로 사용하여 정류기를 제어하는 디지털 제어 시스템을 사용합니다.
2 TMS320F240의 주요 기능
3 PWM 정류기 메인 회로 및 제어 방식
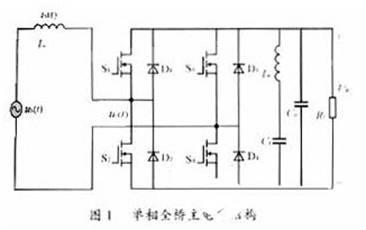
이 기사의 주 회로는 그림 1과 같이 단상 풀 브리지 구조를 채택합니다.


그림에서 uN
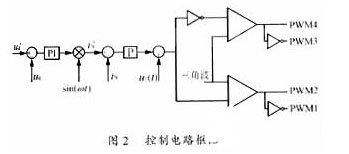

구체적인 제어 원리는 다음과 같이 간략하게 설명됩니다. 출력 전압 샘플링 값(ud)과 지정된 기준 전압(ud*)의 편차가 PI로 전송됩니다. 조정기, 그리고 구해진 값은 기준 전류 신호의 진폭으로 사용되며, 기준 정현파 신호[sin(Ωt)] 이후에는 전원 전압과 동일한 위상을 곱하여 기준 전류의 값으로 사용됩니다. 입력 전류 샘플링 값은 인덕턴스 회로에서 얻어지고 전류 오류 신호는 비례 조정기로 전송됩니다. 입력전압 보상신호[uT]에 출력값이 더해진다.


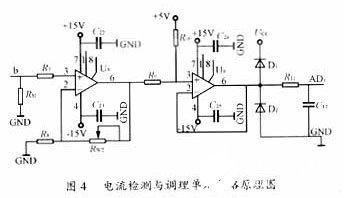
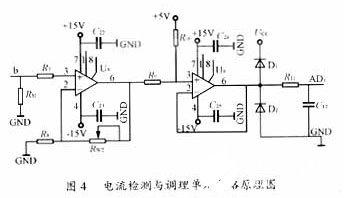
전류 감지 및 조절 장치 회로는 그림 4와 같습니다. 전류의 출력 전류 신호 후 감지기 측정 저항 RM에 의해 전압 신호로 변환되고 연산 증폭기 U8에 의해 형성된 증폭기의 이득은 RM의 값에 의해 결정되므로 출력 바이폴라 신호는 ±5V 범위에 들어갈 수 있습니다. 연산 증폭기(U9)는 양극성 신호를 비례적으로 단극성 신호로 변환하는 레벨 극성 변환단을 구성한다. DSPA/D 변환을 위해서는 유니폴라 0~+5V 신호가 필요하며, +5V 전원은 LM336으로 구성된 레퍼런스 전원으로 공급된다. AC 입력 전류의 스위칭 주파수의 하위 고조파를 걸러내기 위해 RC로 구성된 간단한 저역 통과 필터와 XNUMX개의 다이오드는 클램핑 다이오드입니다.

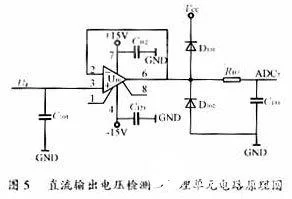
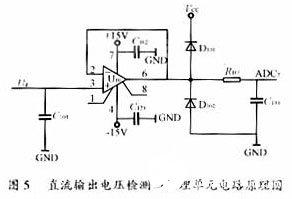
DC 출력 전압 감지 및 조정 장치는 DC 측 전압을 위한 폐쇄 루프 프런트 엔드 센서입니다. 목적은 DC 측을 측정하는 것입니다. 콘덴서 전압. 커패시터 전압에는 특정 리플이 포함되어 있으므로 필터링 링크를 도입해야 합니다. 회로 원리는 그림 5에 나와 있습니다.

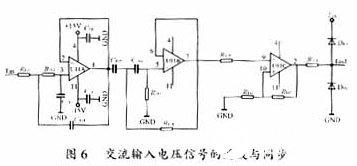
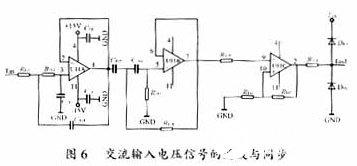
AC 입력 전압 신호는 동기화 신호로 사용됩니다. 전력망에서 입력되는 전압 신호는 순수한 사인파가 아닌 경우가 많기 때문에 전력망 입력 전압의 위상을 정확하게 감지하려면 필터링해야 합니다. 필터는 저역 통과 필터와 고역 통과 필터를 포함한다. 부분. 연산 증폭기 U11A 및 주변 저항-커패시턴스 네트워크는 11차 저역 통과 필터를 형성합니다. 저역 통과 필터는 전력망의 입력 신호에서 고조파를 필터링할 수 있으므로 파형은 개선되지만 위상이 지연되므로 보상을 위해 고역 통과 필터가 도입됩니다. UXNUMXB 및 주변 장치 저항기-커패시터 네트워크는 6차 고역 통과 필터를 형성합니다. 회로에서 고역 통과 필터와 저역 통과 필터의 토폴로지 구조가 정확히 동일하고 저항과 정전 용량이 대칭적으로 분포되어 있음을 알 수 있습니다. 다양한 매개변수가 적절하게 선택되는 한 고역 통과 필터의 선행 위상은 저역 통과 필터의 지연 위상을 상쇄할 수 있습니다. 두 번 필터링하면 고조파가 필터링될 뿐만 아니라 파형이 사인에 가깝고 위상 변이가 없습니다. 필터링 후 제로 크로싱 히스테리시스 회로를 통과하여 전력망의 입력 신호와 완전히 동기화된 구형파 신호를 얻습니다. 회로는 그림 XNUMX에 나와 있습니다.

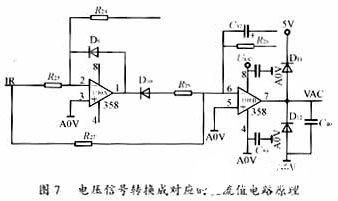
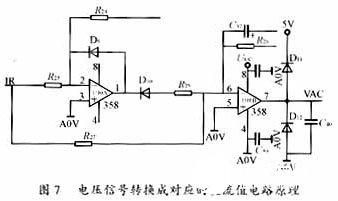
또한 입력 전압값의 검출은 전압의 순시값이 아니라 실효값이므로 Fig. 7과 같은 정밀정류회로를 이용하여 필터링된 전압신호를 해당 DC값으로 변환한다.

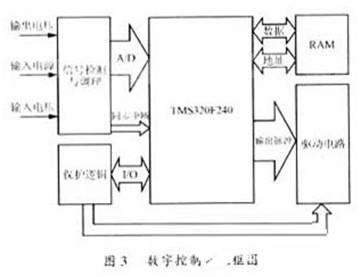
CPU와 그 주변 회로는 주로 클럭 회로, 리셋 회로 등을 포함합니다. 또한 이 시스템은 디버깅의 편의를 위해 16비트 RAM 칩도 프로그램 메모리로 확장했습니다. 구동회로는 펄스의 구동능력과 아이솔레이션을 향상시키는 역할을 한다. 보호 논리 회로는 오류가 발생할 때 시스템이 하드웨어의 출력 펄스 신호를 직접 차단할 수 있도록 합니다.
5 제어 시스템의 소프트웨어 설계
이 기사의 제어 시스템 소프트웨어에는 주로 다음 부분이 포함됩니다.
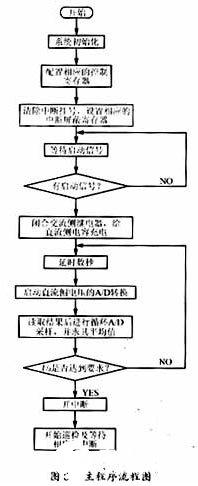
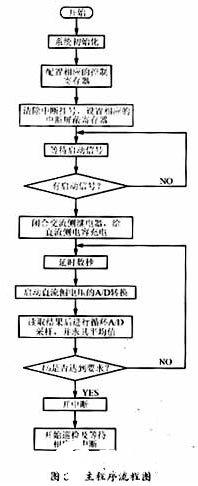
1) 메인 프로그램은 주로 시스템의 초기화와 시스템의 각 입력 수량의 루프 감지를 완료합니다.
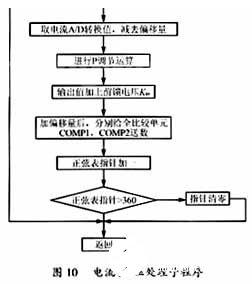
2) 현재 처리 서브루틴은 주로 제어 시스템에서 현재 제어 루프의 데이터 처리를 완료합니다.
3) 전압 처리 서브루틴은 주로 제어 시스템에서 전압 제어 루프의 데이터 처리를 완료합니다.
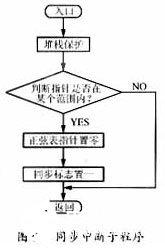
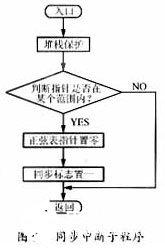
4) 동기화 인터럽트 서브루틴은 동기화 신호를 인터럽트 소스로 사용하고 전체 제어 시스템의 소프트웨어 실행 리듬을 그리드 전압과 일관되게 유지하기 위해 동기화 플래그를 설정합니다.
5) 타이머 인터럽트 서브루틴. 이것은 전체 프로그램의 핵심 부분으로, 각 부분의 연산 결과에 따라 필요한 PWM 파형을 생성합니다.
소프트웨어 흐름도는 그림 8, 9 및 10에 나와 있습니다.



6 실험 결과
위의 방식을 이용하여 연구실에 저전력 실험장치를 구축하였으며, 각 부품의 파라미터는 다음과 같다.
입력 전압 AC 170V
출력 전압 DC 300V
출력 전력 360W
각 부분의 파형은 그림 11 및 12에 나와 있습니다.


7 결론
PWM 정류기는 입력 역률을 1에 가깝게 만들 수 있는 새로운 유형의 전력 변환기입니다. 이 논문은 전류 추적 제어 방식을 채택하고 고성능 DSP 칩 TMS320F240을 핵심으로 하는 디지털 제어 시스템을 설계하고 낮은 전류를 전도합니다. - 전력 실험. 마지막으로, 실험은 제어 시스템이 유연한 제어, 고정밀, 우수한 동적 응답 및 적은 간섭의 장점을 가지고 있음을 증명합니다.
저자: 류옌주
1 소개
PWM 정류기는 펄스 폭 변조 기술을 적용하여 개발된 새로운 유형의 전력 변환기입니다. 기본 원리는 전원스위치관의 온-오프 상태를 제어하여 정류기의 입력전류를 정현파에 가깝게 하는 것으로 전류와 전압이 같은 위상에 있으므로 전류 고조파의 대부분을 제거하고 1에 가까운 역률. 이 기사에서는 TI의 TMS320F240DSP를 사용하여 정류기의 디지털 제어를 구현합니다. 이 방법은 아날로그 제어에 비해 다음과 같은 장점이 있습니다.
1) 유연한 제어 디지털 제어 시스템에서 소프트웨어 알고리즘은 주로 아날로그 제어보다 유연한 제어 체계를 구현하는 데 사용됩니다.
2) 높은 신뢰성 마이크로 컴퓨터 시스템은 더 적은 수의 부품을 사용하고 모든 신호가 디지털 방식으로 처리되므로 간섭이 적고 신뢰성이 높습니다.
3) 오류 분석이 쉽고 신호 감지가 획득한 정보를 저장하며 기억하는 기능이 있으므로 오류 진단을 쉽게 실현할 수 있습니다.
4) 간단한 파라미터 설정으로 시스템 디버깅 작업이 매우 편리합니다.
위의 고려 사항을 기반으로 이 기사에서는 DSP를 코어로 사용하여 정류기를 제어하는 디지털 제어 시스템을 사용합니다.
2 TMS320F240의 주요 기능
3 PWM 정류기 주회로 및 제어 방식
이 기사의 주 회로는 그림 1과 같이 단상 풀 브리지 구조를 채택합니다.
그림에서 uN
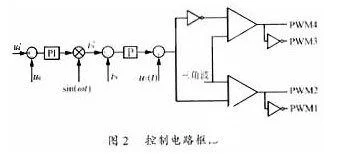
구체적인 제어 원리를 간단히 설명하면 다음과 같다. 출력 전압 샘플링 값(ud)과 주어진 기준 전압(ud*)의 편차가 PI 레귤레이터로 보내지고, 얻어진 값이 기준 전류의 진폭으로 사용된다. 신호에 전원전압과 같은 위상을 곱한 것입니다. 기준 사인 신호[sin(ωt)] 다음에 기준 전류의 값으로 사용합니다. 입력 전류 샘플링 값은 인덕턴스 회로에서 얻어지며 전류 오류 신호는 비례 조정기로 전송됩니다. 출력값은 입력 전압 보상 신호[uT
전류 감지 및 조절 장치 회로는 그림 4에 나와 있습니다. 전류 센서의 출력 전류 신호가 측정 저항 RM에 의해 전압 신호로 변환된 후 연산 증폭기 U8에 의해 형성된 증폭기의 이득은 RM 값에 의해 결정됩니다. , 출력 바이폴라 신호가 ±5V 범위에 들어갈 수 있도록 합니다. 연산 증폭기(U9)는 양극성 신호를 비례적으로 단극성 신호로 변환하는 레벨 극성 변환단을 구성한다. DSPA/D 변환을 위해서는 유니폴라 0~+5V 신호가 필요하며, +5V 전원은 LM336으로 구성된 레퍼런스 전원으로 공급된다. AC 입력 전류의 스위칭 주파수의 하위 고조파를 걸러내기 위해 RC로 구성된 간단한 저역 통과 필터와 XNUMX개의 다이오드는 클램핑 다이오드입니다.
DC 출력 전압 감지 및 조절 장치는 DC 측 전압에 대한 폐쇄 루프 프런트 엔드 센서입니다. 목적은 DC 측 커패시터 전압을 측정하는 것입니다. 커패시터 전압에는 특정 리플이 포함되어 있으므로 필터링 링크를 도입해야 합니다. 회로 원리는 그림 5에 나와 있습니다.
AC 입력 전압 신호는 동기화 신호로 사용됩니다. 전력망에서 입력되는 전압 신호는 순수한 사인파가 아닌 경우가 많기 때문에 전력망 입력 전압의 위상을 정확하게 감지하려면 필터링해야 합니다. 필터는 저역 통과 필터와 고역 통과 필터를 포함한다. 부분. 연산 증폭기 U11A 및 주변 저항-커패시턴스 네트워크는 11차 저역 통과 필터를 형성합니다. 저역 통과 필터는 전력망의 입력 신호에서 고조파를 필터링할 수 있으므로 파형은 개선되지만 위상이 지연되므로 보상을 위해 고역 통과 필터가 도입됩니다. U6B 및 주변 저항-커패시터 네트워크는 XNUMX차 고역 통과 필터를 형성합니다. 고역 통과 필터와 저역 통과 필터의 토폴로지 구조가 정확히 동일하고 저항과 커패시턴스가 대칭으로 분포되어 있음을 회로에서 볼 수 있습니다. 다양한 매개변수가 적절하게 선택되는 한 고역 통과 필터의 선행 위상은 저역 통과 필터의 지연 위상을 상쇄할 수 있습니다. 두 번 필터링하면 고조파가 필터링될 뿐만 아니라 파형이 사인에 가깝고 위상 편이가 없습니다. 필터링 후 제로 크로싱 히스테리시스 회로를 통과하여 전력망의 입력 신호와 완전히 동기화된 구형파 신호를 얻습니다. 회로는 그림 XNUMX에 나와 있습니다.
또한 입력 전압값의 검출은 전압의 순시값이 아니라 실효값이므로 Fig. 7과 같은 정밀정류회로를 이용하여 필터링된 전압신호를 해당 DC값으로 변환한다.
CPU와 그 주변 회로는 주로 클럭 회로, 리셋 회로 등을 포함합니다. 또한 이 시스템은 디버깅의 편의를 위해 16비트 RAM 칩도 프로그램 메모리로 확장했습니다. 구동회로는 펄스의 구동능력과 아이솔레이션을 향상시키는 역할을 한다. 보호 논리 회로는 오류가 발생할 때 시스템이 하드웨어의 출력 펄스 신호를 직접 차단할 수 있도록 합니다.
5 제어 시스템의 소프트웨어 설계
이 기사의 제어 시스템 소프트웨어에는 주로 다음 부분이 포함됩니다.
1) 메인 프로그램은 주로 시스템의 초기화와 시스템의 각 입력 수량의 루프 감지를 완료합니다.
2) 현재 처리 서브루틴은 주로 제어 시스템에서 현재 제어 루프의 데이터 처리를 완료합니다.
3) 전압 처리 서브루틴은 주로 제어 시스템에서 전압 제어 루프의 데이터 처리를 완료합니다.
4) 동기화 인터럽트 서브루틴은 동기화 신호를 인터럽트 소스로 사용하고 전체 제어 시스템의 소프트웨어 작동 리듬을 그리드 전압과 일치하도록 동기화 플래그를 설정합니다.
5) 타이머 인터럽트 서브루틴. 이것은 전체 프로그램의 핵심 부분으로, 각 부분의 연산 결과에 따라 필요한 PWM 파형을 생성합니다.
소프트웨어 흐름도는 그림 8, 9 및 10에 나와 있습니다.

6 실험 결과
위의 방식을 이용하여 연구실에 저전력 실험장치를 구축하였으며, 각 부품의 파라미터는 다음과 같다.
입력 전압 AC 170V
출력 전압 DC 300V
출력 전력 360W
각 부분의 파형은 그림 11 및 12에 나와 있습니다.

7 결론
PWM 정류기는 입력 역률을 1에 가깝게 만들 수 있는 새로운 유형의 전력 변환기입니다. 이 논문은 전류 추적 제어 방식을 채택하고 고성능 DSP 칩 TMS320F240을 핵심으로 하는 디지털 제어 시스템을 설계하고 낮은 전류를 전도합니다. - 전력 실험. 마지막으로, 실험은 제어 시스템이 유연한 제어, 고정밀, 우수한 동적 응답 및 적은 간섭의 장점을 가지고 있음을 증명합니다.