"Penyearah PWM adalah jenis daya baru Converter dikembangkan dengan menerapkan modulasi lebar pulsa teknologi. Prinsip dasarnya adalah membuat arus masukan penyearah mendekati gelombang sinus dengan mengontrol keadaan hidup-mati tabung saklar daya, dan arus serta tegangan berada dalam fase yang sama, sehingga menghilangkan sebagian besar harmonisa arus dan membuat faktor daya mendekati 1. Artikel ini menggunakan TMS320F240DSP TI untuk menerapkan kontrol digital penyearah. Metode ini memiliki keuntungan sebagai berikut dibandingkan kontrol analog.
"
Pengarang: Liu Yanzhu
1 Pendahuluan
Penyearah PWM adalah jenis konverter daya baru yang dikembangkan dengan menerapkan teknologi modulasi lebar pulsa. Prinsip dasarnya adalah membuat arus input penyearah mendekati gelombang sinus dengan mengontrol status on-off dari tabung sakelar daya, dan arus dan tegangan berada dalam fase yang sama, sehingga menghilangkan sebagian besar harmonik arus dan membuat faktor daya mendekati 1. Artikel ini menggunakan TMS320F240DSP TI untuk menerapkan kontrol digital penyearah. Metode ini memiliki keuntungan sebagai berikut dibandingkan kontrol analog:
1) Kontrol fleksibel Dalam sistem kontrol digital, algoritma perangkat lunak terutama digunakan untuk mengimplementasikan skema kontrol, yang lebih fleksibel daripada kontrol analog;
2) Keandalan tinggi Sistem mikrokomputer menggunakan lebih sedikit komponen dan semua sinyal diproses secara digital, sehingga interferensinya kecil dan keandalannya tinggi;
3) Analisis kesalahan mudah, deteksi sinyal akan menyimpan informasi yang diperoleh, dan memiliki kemampuan untuk mengingat, sehingga mudah untuk mewujudkan diagnosis kesalahan;
4) Pengaturan parameter sederhana dapat membuat debugging sistem bekerja dengan sangat nyaman.
Berdasarkan pertimbangan di atas, artikel ini menggunakan sistem kontrol digital dengan DSP sebagai inti untuk mengontrol penyearah.
2 Fitur utama TMS320F240
3 PWM penyearah utama sirkit dan skema kontrol
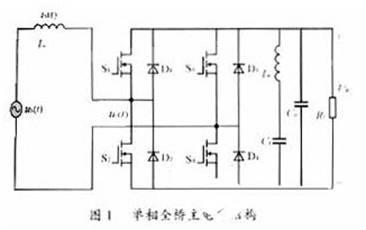
Sirkuit utama dalam artikel ini mengadopsi struktur jembatan penuh fase tunggal, seperti yang ditunjukkan pada Gambar 1.


Pada gambar, uN
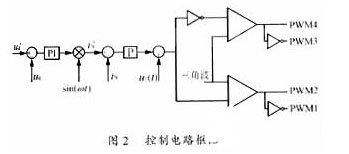

Prinsip kontrol spesifik dijelaskan secara singkat sebagai berikut: Penyimpangan nilai sampling tegangan keluaran (ud) dan tegangan referensi yang diberikan (ud*) dikirim ke PI pengatur, dan nilai yang diperoleh digunakan sebagai amplitudo sinyal arus referensi, dikalikan dengan fasa yang sama dengan tegangan catu daya. Setelah sinyal sinus referensi[sin(ωt)]digunakan sebagai nilai arus referensi. Nilai pengambilan sampel arus masukan diperoleh dari rangkaian induktansi, dan sinyal kesalahan arus dikirim ke pengatur proporsional. Nilai keluaran ditambah dengan sinyal kompensasi tegangan masukan[uT


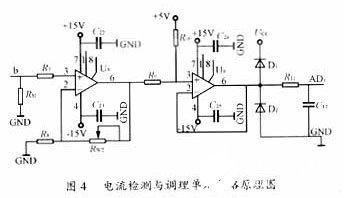
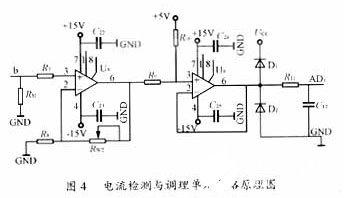
Deteksi arus dan rangkaian unit pengkondisian ditunjukkan pada Gambar 4. Setelah sinyal arus keluaran dari arus Sensor diubah menjadi sinyal tegangan dengan mengukur resistansi RM, penguatan penguat yang dibentuk oleh penguat operasional U8 ditentukan oleh nilai RM, sehingga sinyal bipolar keluaran dapat berada dalam kisaran ±5V. Penguat operasional U9 merupakan tahap konversi polaritas level, yang mengubah sinyal bipolar menjadi sinyal unipolar secara proporsional. Sinyal unipolar 0~+5V diperlukan untuk konversi DSPA/D, dan catu daya +5V disuplai oleh catu daya referensi yang terdiri dari LM336. Sebuah filter low-pass sederhana terdiri dari RC untuk menyaring sub-harmonik dari frekuensi switching dari arus input AC, dan kedua dioda adalah dioda penjepit.

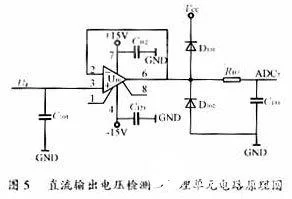
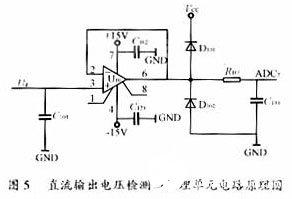
Unit deteksi dan pengkondisian tegangan keluaran DC adalah sensor ujung depan loop tertutup untuk tegangan sisi DC. Tujuannya adalah untuk mengukur sisi DC kapasitor tegangan. Karena tegangan kapasitor mengandung riak tertentu, maka perlu dipasang tautan penyaringan. Prinsip rangkaian ditunjukkan pada Gambar 5.

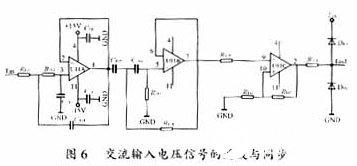
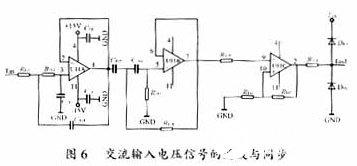
Sinyal tegangan input AC digunakan sebagai sinyal sinkronisasi. Karena input sinyal tegangan dari jaringan listrik seringkali bukan gelombang sinus murni, maka sinyal tersebut harus disaring untuk secara akurat mendeteksi fase tegangan input jaringan listrik. Filter terdiri dari filter lolos rendah dan filter lolos tinggi. bagian. Penguat operasional U11A dan jaringan kapasitansi resistansi periferal membentuk filter low-pass orde kedua. Filter low-pass dapat menyaring harmonik orde tinggi dalam sinyal input jaringan listrik, sehingga bentuk gelombangnya ditingkatkan, tetapi fasenya tertinggal, sehingga filter high-pass diperkenalkan untuk kompensasi. U11B dan periferalnya Penghambat-jaringan kapasitor membentuk filter high-pass orde kedua. Dapat dilihat dari rangkaian bahwa struktur topologi filter high-pass dan low-pass persis sama, dan resistansi dan kapasitansi didistribusikan secara simetris. Selama berbagai parameter dipilih dengan tepat, fase terdepan dari filter lolos tinggi hanya dapat mengimbangi fase tertinggal dari filter lolos rendah. Setelah penyaringan dua kali, tidak hanya harmonik yang disaring, bentuk gelombangnya mendekati sinus, dan tidak ada pergeseran fasa. Setelah penyaringan, ia melewati sirkuit histeresis zero-crossing untuk mendapatkan sinyal gelombang persegi yang sepenuhnya disinkronkan dengan sinyal input dari jaringan listrik. Rangkaian tersebut ditunjukkan pada Gambar 6.

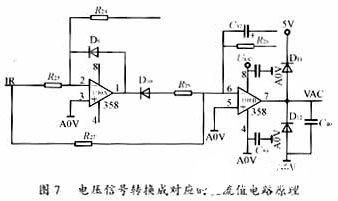
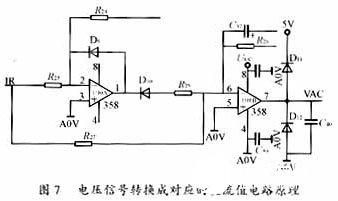
Selain itu, deteksi nilai tegangan input bukanlah nilai tegangan sesaat tetapi nilai efektif, sehingga rangkaian penyearah presisi yang ditunjukkan pada Gambar 7 digunakan untuk mengubah sinyal tegangan yang difilter menjadi nilai DC yang sesuai.

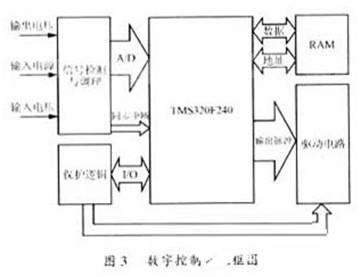
CPU dan sirkuit periferalnya terutama mencakup sirkuit jam, sirkuit reset, dan sebagainya. Selain itu, untuk kenyamanan debugging, sistem ini juga telah memperluas chip RAM 16-bit sebagai memori program. Sirkuit penggerak berperan dalam meningkatkan kemampuan mengemudi dan isolasi pulsa. Rangkaian logika perlindungan memastikan bahwa ketika terjadi kesalahan, sistem dapat langsung memblokir sinyal pulsa keluaran dari perangkat keras.
5 Desain perangkat lunak sistem kontrol
Perangkat lunak sistem kontrol dalam artikel ini terutama mencakup bagian-bagian berikut:
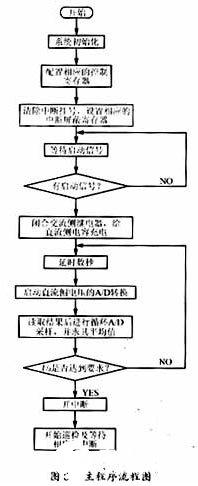
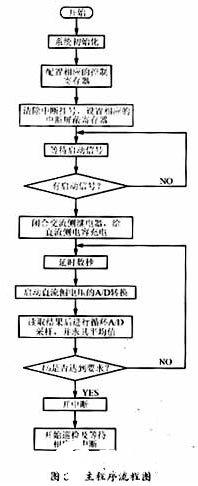
1) Program utama terutama menyelesaikan inisialisasi sistem dan deteksi loop dari setiap kuantitas input dalam sistem;
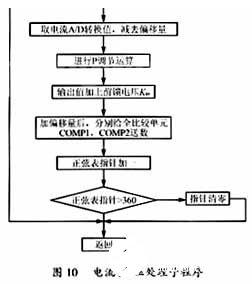
2) Subrutin pemrosesan saat ini terutama menyelesaikan pemrosesan data dari loop kontrol saat ini dalam sistem kontrol;
3) Subrutin pemrosesan tegangan terutama menyelesaikan pemrosesan data loop kontrol tegangan dalam sistem kontrol;
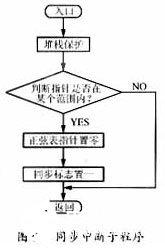
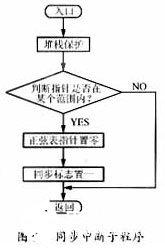
4) Subrutin interupsi sinkronisasi mengambil sinyal sinkronisasi sebagai sumber interupsi dan menyetel flag sinkronisasi untuk menjaga agar perangkat lunak menjalankan ritme dari seluruh sistem kontrol yang konsisten dengan tegangan grid;
5) Subrutin interupsi timer. Ini adalah bagian inti dari keseluruhan program, yang menghasilkan gelombang PWM yang diperlukan sesuai dengan hasil setiap bagian operasi.
Diagram alir perangkat lunak ditunjukkan pada Gambar 8, 9, dan 10.



6 Hasil percobaan
Dengan menggunakan skema di atas, artikel ini membuat perangkat eksperimental berdaya rendah di laboratorium, dan parameter setiap bagian adalah sebagai berikut:
Tegangan masukan AC 170V
Tegangan keluaran DC 300V
Daya keluaran 360W
Bentuk gelombang masing-masing bagian ditunjukkan pada Gambar 11 dan 12.


7 Kesimpulan
Penyearah PWM adalah jenis baru konverter daya, yang dapat membuat faktor daya input mendekati 1. Makalah ini mengadopsi metode kontrol pelacakan saat ini, merancang sistem kontrol digital dengan chip DSP berkinerja tinggi TMS320F240 sebagai intinya, dan melakukan -eksperimen kekuatan. Akhirnya, percobaan membuktikan bahwa sistem kontrol memiliki keunggulan kontrol fleksibel, presisi tinggi, respons dinamis yang baik, dan sedikit gangguan.
Pengarang: Liu Yanzhu
1 Pendahuluan
Penyearah PWM adalah jenis konverter daya baru yang dikembangkan dengan menerapkan teknologi modulasi lebar pulsa. Prinsip dasarnya adalah membuat arus input penyearah mendekati gelombang sinus dengan mengontrol status on-off dari tabung sakelar daya, dan arus dan tegangan berada dalam fase yang sama, sehingga menghilangkan sebagian besar harmonik arus dan membuat faktor daya mendekati 1. Artikel ini menggunakan TMS320F240DSP TI untuk menerapkan kontrol digital penyearah. Metode ini memiliki keuntungan sebagai berikut dibandingkan kontrol analog:
1) Kontrol fleksibel Dalam sistem kontrol digital, algoritma perangkat lunak terutama digunakan untuk mengimplementasikan skema kontrol, yang lebih fleksibel daripada kontrol analog;
2) Keandalan tinggi Sistem mikrokomputer menggunakan lebih sedikit komponen dan semua sinyal diproses secara digital, sehingga interferensinya kecil dan keandalannya tinggi;
3) Analisis kesalahan mudah, deteksi sinyal akan menyimpan informasi yang diperoleh, dan memiliki kemampuan untuk mengingat, sehingga mudah untuk mewujudkan diagnosis kesalahan;
4) Pengaturan parameter sederhana dapat membuat debugging sistem bekerja dengan sangat nyaman.
Berdasarkan pertimbangan di atas, artikel ini menggunakan sistem kontrol digital dengan DSP sebagai inti untuk mengontrol penyearah.
2 Fitur utama TMS320F240
3 sirkuit utama penyearah PWM dan skema kontrol
Sirkuit utama dalam artikel ini mengadopsi struktur jembatan penuh fase tunggal, seperti yang ditunjukkan pada Gambar 1.
Pada gambar, uN
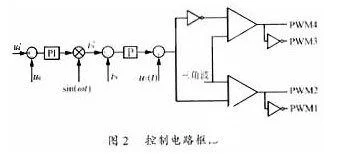
Prinsip kontrol spesifik secara singkat dijelaskan sebagai berikut: Deviasi nilai sampling tegangan output (ud) dan tegangan referensi yang diberikan (ud*) dikirim ke regulator PI, dan nilai yang diperoleh digunakan sebagai amplitudo arus referensi. sinyal, dikalikan dengan fase yang sama dengan tegangan catu daya Setelah sinyal sinus referensi[sin(ωt)] digunakan sebagai nilai arus referensi. Nilai sampling arus input diperoleh dari rangkaian induktansi, dan sinyal kesalahan arus dikirim ke regulator proporsional. Nilai output ditambahkan dengan sinyal kompensasi tegangan input[uT
Rangkaian unit pendeteksi dan pengkondisian arus ditunjukkan pada Gambar 4. Setelah sinyal arus keluaran dari sensor arus diubah menjadi sinyal tegangan oleh resistansi pengukur RM, gain penguat yang dibentuk oleh penguat operasional U8 ditentukan oleh nilai RM , sehingga sinyal bipolar keluaran dapat berada dalam kisaran ±5V. Penguat operasional U9 merupakan tahap konversi polaritas level, yang mengubah sinyal bipolar menjadi sinyal unipolar secara proporsional. Sinyal unipolar 0~+5V diperlukan untuk konversi DSPA/D, dan catu daya +5V disuplai oleh catu daya referensi yang terdiri dari LM336. Sebuah filter low-pass sederhana terdiri dari RC untuk menyaring sub-harmonik dari frekuensi switching dari arus input AC, dan kedua dioda adalah dioda penjepit.
Deteksi tegangan keluaran DC dan unit pengkondisian adalah sensor ujung depan loop tertutup untuk tegangan samping DC. Tujuannya adalah untuk mengukur tegangan kapasitor sisi DC. Karena tegangan kapasitor mengandung riak tertentu, ia perlu memperkenalkan tautan penyaringan. Prinsip rangkaian ditunjukkan pada Gambar 5.
Sinyal tegangan input AC digunakan sebagai sinyal sinkronisasi. Karena input sinyal tegangan dari jaringan listrik seringkali bukan gelombang sinus murni, maka sinyal tersebut harus disaring untuk secara akurat mendeteksi fase tegangan input jaringan listrik. Filter terdiri dari filter lolos rendah dan filter lolos tinggi. bagian. Penguat operasional U11A dan jaringan kapasitansi resistansi periferal membentuk filter low-pass orde kedua. Filter low-pass dapat menyaring harmonik orde tinggi dalam sinyal input jaringan listrik, sehingga bentuk gelombangnya ditingkatkan, tetapi fasenya tertinggal, sehingga filter high-pass diperkenalkan untuk kompensasi. U11B dan jaringan resistor-kapasitor perifernya membentuk filter high-pass orde kedua. Dapat dilihat dari rangkaian bahwa struktur topologi filter high-pass dan low-pass persis sama, dan resistansi dan kapasitansi didistribusikan secara simetris. Selama berbagai parameter dipilih dengan tepat, fase terdepan dari filter lolos tinggi hanya dapat mengimbangi fase tertinggal dari filter lolos rendah. Setelah penyaringan dua kali, tidak hanya harmonik yang disaring, bentuk gelombangnya mendekati sinus, dan tidak ada pergeseran fasa. Setelah penyaringan, ia melewati sirkuit histeresis zero-crossing untuk mendapatkan sinyal gelombang persegi yang sepenuhnya disinkronkan dengan sinyal input dari jaringan listrik. Rangkaian tersebut ditunjukkan pada Gambar 6.
Selain itu, deteksi nilai tegangan input bukanlah nilai tegangan sesaat tetapi nilai efektif, sehingga rangkaian penyearah presisi yang ditunjukkan pada Gambar 7 digunakan untuk mengubah sinyal tegangan yang difilter menjadi nilai DC yang sesuai.
CPU dan sirkuit periferalnya terutama mencakup sirkuit jam, sirkuit reset, dan sebagainya. Selain itu, untuk kenyamanan debugging, sistem ini juga telah memperluas chip RAM 16-bit sebagai memori program. Sirkuit penggerak berperan dalam meningkatkan kemampuan mengemudi dan isolasi pulsa. Rangkaian logika perlindungan memastikan bahwa ketika terjadi kesalahan, sistem dapat langsung memblokir sinyal pulsa keluaran dari perangkat keras.
5 Desain perangkat lunak sistem kontrol
Perangkat lunak sistem kontrol dalam artikel ini terutama mencakup bagian-bagian berikut:
1) Program utama terutama menyelesaikan inisialisasi sistem dan deteksi loop dari setiap kuantitas input dalam sistem;
2) Subrutin pemrosesan saat ini terutama menyelesaikan pemrosesan data dari loop kontrol saat ini dalam sistem kontrol;
3) Subrutin pemrosesan tegangan terutama menyelesaikan pemrosesan data loop kontrol tegangan dalam sistem kontrol;
4) Subrutin interupsi sinkronisasi mengambil sinyal sinkronisasi sebagai sumber interupsi dan menetapkan flag sinkronisasi untuk menjaga ritme operasi perangkat lunak dari seluruh sistem kontrol konsisten dengan tegangan grid;
5) Subrutin interupsi timer. Ini adalah bagian inti dari keseluruhan program, yang menghasilkan gelombang PWM yang diperlukan sesuai dengan hasil setiap bagian operasi.
Diagram alir perangkat lunak ditunjukkan pada Gambar 8, 9, dan 10.

6 Hasil percobaan
Dengan menggunakan skema di atas, artikel ini membuat perangkat eksperimental berdaya rendah di laboratorium, dan parameter setiap bagian adalah sebagai berikut:
Tegangan masukan AC 170V
Tegangan keluaran DC 300V
Daya keluaran 360W
Bentuk gelombang masing-masing bagian ditunjukkan pada Gambar 11 dan 12.

7 Kesimpulan
Penyearah PWM adalah jenis baru konverter daya, yang dapat membuat faktor daya input mendekati 1. Makalah ini mengadopsi metode kontrol pelacakan saat ini, merancang sistem kontrol digital dengan chip DSP berkinerja tinggi TMS320F240 sebagai intinya, dan melakukan -eksperimen kekuatan. Akhirnya, percobaan membuktikan bahwa sistem kontrol memiliki keunggulan kontrol fleksibel, presisi tinggi, respons dinamis yang baik, dan sedikit gangguan.
Tautan: R0878LS20K LMG6381QHGE