"วงจรเรียงกระแส PWM เป็นพลังงานชนิดใหม่ Converter พัฒนาโดยการประยุกต์ใช้การมอดูเลตความกว้างพัลส์ เทคโนโลยี. หลักการพื้นฐานคือการทำให้กระแสอินพุทของวงจรเรียงกระแสใกล้เคียงกับคลื่นไซน์โดยการควบคุมสถานะเปิด-ปิดของหลอดสวิตช์ไฟ และกระแสและ แรงดันไฟฟ้า อยู่ในขั้นตอนเดียวกัน จึงขจัดฮาร์โมนิกในปัจจุบันส่วนใหญ่และทำให้ตัวประกอบกำลังใกล้ 1 บทความนี้ใช้ TMS320F240DSP ของ TI เพื่อนำการควบคุมแบบดิจิทัลของวงจรเรียงกระแสมาใช้ วิธีนี้มีข้อดีเหนือการควบคุมแบบแอนะล็อกดังต่อไปนี้
"
ผู้เขียน: Liu Yanzhu
ฮิต: ความรู้เบื้องต้น
วงจรเรียงกระแส PWM เป็นตัวแปลงพลังงานรูปแบบใหม่ที่พัฒนาโดยใช้เทคโนโลยีการปรับความกว้างพัลส์ หลักการพื้นฐานคือการทำให้กระแสอินพุทของวงจรเรียงกระแสใกล้กับคลื่นไซน์โดยการควบคุมสถานะเปิด-ปิดของหลอดสวิตช์ไฟ และกระแสและแรงดันอยู่ในเฟสเดียวกัน จึงขจัดฮาร์โมนิกในปัจจุบันส่วนใหญ่และทำให้ ตัวประกอบกำลังใกล้เคียงกับ 1 บทความนี้ใช้ TMS320F240DSP ของ TI เพื่อนำการควบคุมแบบดิจิทัลของวงจรเรียงกระแสมาใช้ วิธีนี้มีข้อดีเหนือการควบคุมแบบแอนะล็อกดังต่อไปนี้:
1) การควบคุมที่ยืดหยุ่น ในระบบควบคุมแบบดิจิทัล อัลกอริทึมของซอฟต์แวร์ส่วนใหญ่จะใช้ในการปรับใช้รูปแบบการควบคุม ซึ่งมีความยืดหยุ่นมากกว่าการควบคุมแบบแอนะล็อก
2) ความน่าเชื่อถือสูง ระบบไมโครคอมพิวเตอร์ใช้ส่วนประกอบน้อยลงและสัญญาณทั้งหมดได้รับการประมวลผลแบบดิจิทัล ดังนั้นการรบกวนจึงน้อยและความน่าเชื่อถือสูง
3) การวิเคราะห์ข้อบกพร่องทำได้ง่าย การตรวจจับสัญญาณจะจัดเก็บข้อมูลที่ได้รับ และมีความสามารถในการจดจำ จึงง่ายต่อการรับรู้การวินิจฉัยข้อผิดพลาด
4) การตั้งค่าพารามิเตอร์อย่างง่ายสามารถทำให้การดีบักระบบทำงานสะดวกมาก
จากการพิจารณาข้างต้น บทความนี้ใช้ระบบควบคุมดิจิทัลที่มี DSP เป็นแกนหลักในการควบคุมวงจรเรียงกระแส
2 คุณสมบัติหลักของ TMS320F240
3 PWM วงจรเรียงกระแสหลัก วงจรไฟฟ้า และแผนการควบคุม
วงจรหลักในบทความนี้ใช้โครงสร้างแบบฟูลบริดจ์แบบเฟสเดียว ดังแสดงในรูปที่ 1


ในรูป uN
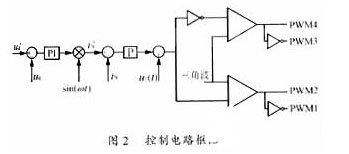

หลักการควบคุมเฉพาะมีการอธิบายโดยย่อดังนี้: ส่วนเบี่ยงเบนของค่าการสุ่มตัวอย่างแรงดันไฟฟ้าเอาท์พุต (ud) และแรงดันอ้างอิงที่กำหนด (ud*) จะถูกส่งไปยัง PI เครื่องควบคุมและค่าที่ได้รับจะถูกใช้เป็นแอมพลิจูดของสัญญาณกระแสอ้างอิง คูณด้วยเฟสเดียวกันกับแรงดันไฟฟ้าของแหล่งจ่ายไฟ หลังจากสัญญาณไซน์อ้างอิง [sin(ωt)] จะถูกใช้เป็นค่าของกระแสอ้างอิง ค่าการสุ่มตัวอย่างกระแสอินพุตได้มาจากวงจรตัวเหนี่ยวนำ และสัญญาณข้อผิดพลาดปัจจุบันจะถูกส่งไปยังตัวควบคุมตามสัดส่วน ค่าเอาต์พุตจะถูกเพิ่มด้วยสัญญาณการชดเชยแรงดันไฟฟ้าอินพุต[uT


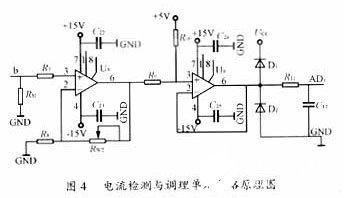
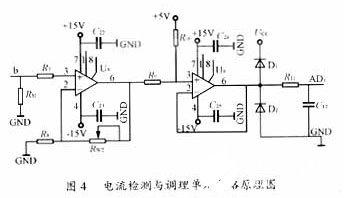
วงจรหน่วยตรวจจับและปรับสภาพกระแสที่แสดงในรูปที่ 4 หลังจากสัญญาณกระแสไฟขาออกของกระแส เซ็นเซอร์ จะถูกแปลงเป็นสัญญาณแรงดันไฟโดยการวัดความต้านทาน RM อัตราขยายของแอมพลิฟายเออร์ที่เกิดจากแอมพลิฟายเออร์ในการดำเนินงาน U8 ถูกกำหนดโดยค่า RM เพื่อให้สัญญาณไบโพลาร์เอาท์พุตอยู่ในช่วง ±5V แอมพลิฟายเออร์สำหรับปฏิบัติการ U9 ประกอบขึ้นเป็นขั้นตอนการแปลงขั้วระดับ ซึ่งแปลงสัญญาณไบโพลาร์เป็นสัญญาณยูนิโพลาร์ตามสัดส่วน จำเป็นต้องใช้สัญญาณ unipolar 0~+5V สำหรับการแปลง DSPA/D และแหล่งจ่ายไฟ +5V นั้นจัดหาโดยแหล่งจ่ายไฟอ้างอิงที่ประกอบด้วย LM336 ตัวกรองความถี่ต่ำผ่านอย่างง่ายที่ประกอบด้วย RC เพื่อกรองฮาร์โมนิกย่อยของความถี่สวิตชิ่งของกระแสไฟเข้า AC และไดโอดสองตัวเป็นไดโอดหนีบ

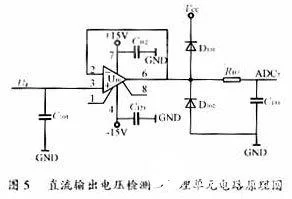
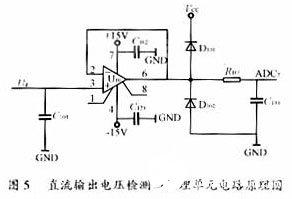
หน่วยตรวจจับและปรับแรงดันไฟฟ้าเอาต์พุต DC เป็นเซ็นเซอร์ส่วนหน้าแบบวงปิดสำหรับแรงดันไฟฟ้าฝั่ง DC จุดประสงค์คือเพื่อวัดด้าน DC capacitor แรงดันไฟฟ้า. เนื่องจากแรงดันไฟฟ้าของตัวเก็บประจุมีการกระเพื่อมบางอย่าง จึงจำเป็นต้องมีจุดเชื่อมต่อการกรอง หลักการของวงจรแสดงในรูปที่ 5

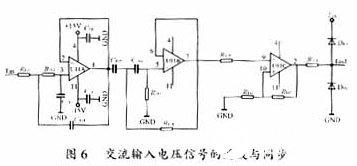
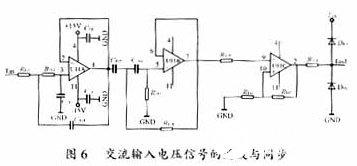
สัญญาณแรงดันไฟฟ้าอินพุต AC ใช้เป็นสัญญาณซิงโครไนซ์ เนื่องจากสัญญาณแรงดันไฟเข้าจากโครงข่ายไฟฟ้ามักจะไม่ใช่คลื่นไซน์บริสุทธิ์ จึงจำเป็นต้องกรองสัญญาณดังกล่าวเพื่อตรวจจับเฟสของแรงดันไฟฟ้าอินพุตของกริดพลังงานอย่างแม่นยำ ตัวกรองประกอบด้วยตัวกรองความถี่ต่ำและตัวกรองความถี่สูง ส่วนหนึ่ง. แอมพลิฟายเออร์ปฏิบัติการ U11A และเครือข่ายความต้านทาน-ความจุต่อพ่วงสร้างตัวกรองความถี่ต่ำผ่านอันดับสอง ตัวกรองความถี่ต่ำผ่านสามารถกรองฮาร์โมนิกที่มีลำดับสูงในสัญญาณอินพุตของโครงข่ายไฟฟ้า เพื่อให้รูปคลื่นได้รับการปรับปรุง แต่เฟสมีความล่าช้า ดังนั้นจึงแนะนำตัวกรองความถี่สูงผ่านเพื่อชดเชย U11B และอุปกรณ์ต่อพ่วง ตัวต้านทาน- เครือข่ายตัวเก็บประจุสร้างตัวกรองความถี่สูงอันดับสอง จากวงจรจะเห็นได้ว่าโครงสร้างทอพอโลยีของตัวกรองความถี่สูงผ่านและตัวกรองความถี่ต่ำนั้นเหมือนกันทุกประการ และความต้านทานและความจุจะกระจายอย่างสมมาตร ตราบใดที่เลือกพารามิเตอร์ต่างๆ อย่างเหมาะสม เฟสนำของตัวกรองความถี่สูงผ่านก็สามารถชดเชยเฟสที่ล้าหลังของตัวกรองความถี่ต่ำได้ หลังจากการกรองสองครั้ง ไม่เพียงแต่จะกรองฮาร์โมนิกเท่านั้น รูปคลื่นจะใกล้เคียงกับไซน์ และไม่มีการเปลี่ยนเฟส หลังจากกรองแล้ว จะผ่านวงจรฮิสเทรีซิสแบบไม่มีจุดตัดขวางเพื่อรับสัญญาณคลื่นสี่เหลี่ยมที่ซิงโครไนซ์กับสัญญาณอินพุตของโครงข่ายไฟฟ้าอย่างสมบูรณ์ วงจรแสดงในรูปที่ 6

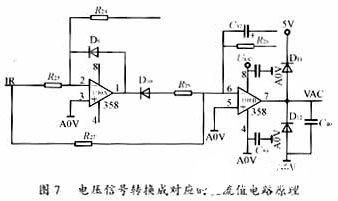
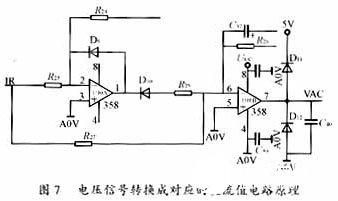
นอกจากนี้ การตรวจจับค่าแรงดันไฟขาเข้าไม่ใช่ค่าแรงดันที่เกิดขึ้นทันที แต่เป็นค่าที่มีประสิทธิภาพ ดังนั้นวงจรเรียงกระแสที่มีความแม่นยำที่แสดงในรูปที่ 7 จะถูกใช้เพื่อแปลงสัญญาณแรงดันไฟที่กรองแล้วให้เป็นค่า DC ที่สอดคล้องกัน

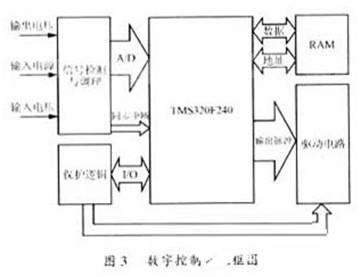
CPU และวงจรต่อพ่วงส่วนใหญ่ประกอบด้วยวงจรนาฬิกา วงจรรีเซ็ต และอื่นๆ นอกจากนี้ เพื่อความสะดวกในการดีบัก ระบบนี้ได้ขยายชิป RAM 16 บิตเป็นหน่วยความจำโปรแกรม วงจรขับเคลื่อนมีบทบาทในการปรับปรุงความสามารถในการขับขี่และการแยกชีพจร วงจรลอจิกป้องกันช่วยให้มั่นใจได้ว่าเมื่อเกิดข้อผิดพลาด ระบบจะบล็อกสัญญาณพัลส์เอาต์พุตจากฮาร์ดแวร์ได้โดยตรง
5 การออกแบบซอฟต์แวร์ของระบบควบคุม
ซอฟต์แวร์ระบบควบคุมในบทความนี้ประกอบด้วยส่วนต่างๆ ดังต่อไปนี้เป็นหลัก:
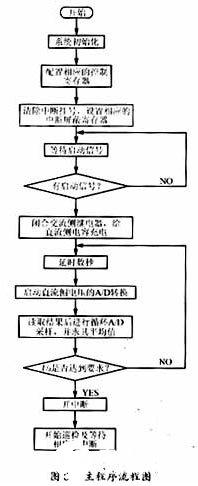
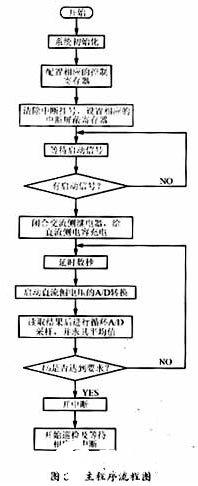
1) โปรแกรมหลักส่วนใหญ่เสร็จสิ้นการเริ่มต้นระบบและการตรวจจับลูปของปริมาณอินพุตแต่ละรายการในระบบ
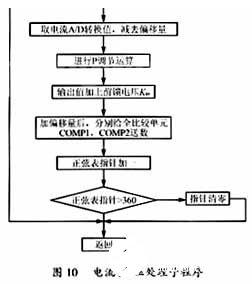
2) รูทีนย่อยการประมวลผลปัจจุบันส่วนใหญ่เสร็จสิ้นการประมวลผลข้อมูลของลูปควบคุมปัจจุบันในระบบควบคุม
3) รูทีนย่อยการประมวลผลแรงดันไฟฟ้าส่วนใหญ่เสร็จสิ้นการประมวลผลข้อมูลของลูปควบคุมแรงดันไฟฟ้าในระบบควบคุม
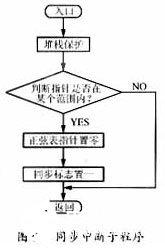
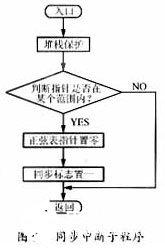
4) รูทีนย่อยการขัดจังหวะการซิงโครไนซ์จะใช้สัญญาณการซิงโครไนซ์เป็นแหล่งสัญญาณขัดจังหวะและตั้งค่าสถานะการซิงโครไนซ์เพื่อให้ซอฟต์แวร์ทำงานตามจังหวะของระบบควบคุมทั้งหมดซึ่งสอดคล้องกับแรงดันไฟฟ้าของกริด
5) ตัวจับเวลาขัดจังหวะรูทีนย่อย นี่คือส่วนหลักของโปรแกรมทั้งหมด ซึ่งสร้างคลื่น PWM ที่ต้องการตามผลลัพธ์ของแต่ละส่วนของการดำเนินการ
ผังงานซอฟต์แวร์แสดงในรูปที่ 8, 9 และ 10



6 ผลการทดลอง
บทความนี้ได้สร้างอุปกรณ์ทดลองที่ใช้พลังงานต่ำในห้องปฏิบัติการโดยใช้โครงร่างข้างต้น และพารามิเตอร์ของแต่ละส่วนมีดังนี้:
แรงดันไฟฟ้าขาเข้า AC 170V
แรงดันไฟขาออก DC 300V
กำลังขับ 360W
รูปคลื่นของแต่ละส่วนแสดงในรูปที่ 11 และ 12


ข้อสรุป 7
วงจรเรียงกระแส PWM เป็นตัวแปลงพลังงานชนิดใหม่ ซึ่งสามารถทำให้ตัวประกอบกำลังอินพุตใกล้เคียงกับ 1 บทความนี้ใช้วิธีการควบคุมการติดตามปัจจุบัน ออกแบบระบบควบคุมแบบดิจิตอลที่มีชิป DSP ประสิทธิภาพสูง TMS320F240 เป็นแกนหลัก และทำงานต่ำ - การทดลองกำลัง สุดท้าย การทดลองพิสูจน์ว่าระบบควบคุมมีข้อดีของการควบคุมที่ยืดหยุ่น ความแม่นยำสูง การตอบสนองแบบไดนามิกที่ดีและมีสัญญาณรบกวนน้อย
ผู้เขียน: Liu Yanzhu
ฮิต: ความรู้เบื้องต้น
วงจรเรียงกระแส PWM เป็นตัวแปลงพลังงานรูปแบบใหม่ที่พัฒนาโดยใช้เทคโนโลยีการปรับความกว้างพัลส์ หลักการพื้นฐานคือการทำให้กระแสอินพุทของวงจรเรียงกระแสใกล้กับคลื่นไซน์โดยการควบคุมสถานะเปิด-ปิดของหลอดสวิตช์ไฟ และกระแสและแรงดันอยู่ในเฟสเดียวกัน จึงขจัดฮาร์โมนิกในปัจจุบันส่วนใหญ่และทำให้ ตัวประกอบกำลังใกล้เคียงกับ 1 บทความนี้ใช้ TMS320F240DSP ของ TI เพื่อนำการควบคุมแบบดิจิทัลของวงจรเรียงกระแสมาใช้ วิธีนี้มีข้อดีเหนือการควบคุมแบบแอนะล็อกดังต่อไปนี้:
1) การควบคุมที่ยืดหยุ่น ในระบบควบคุมแบบดิจิทัล อัลกอริทึมของซอฟต์แวร์ส่วนใหญ่จะใช้ในการปรับใช้รูปแบบการควบคุม ซึ่งมีความยืดหยุ่นมากกว่าการควบคุมแบบแอนะล็อก
2) ความน่าเชื่อถือสูง ระบบไมโครคอมพิวเตอร์ใช้ส่วนประกอบน้อยลงและสัญญาณทั้งหมดได้รับการประมวลผลแบบดิจิทัล ดังนั้นการรบกวนจึงน้อยและความน่าเชื่อถือสูง
3) การวิเคราะห์ข้อบกพร่องทำได้ง่าย การตรวจจับสัญญาณจะจัดเก็บข้อมูลที่ได้รับ และมีความสามารถในการจดจำ จึงง่ายต่อการรับรู้การวินิจฉัยข้อผิดพลาด
4) การตั้งค่าพารามิเตอร์อย่างง่ายสามารถทำให้การดีบักระบบทำงานสะดวกมาก
จากการพิจารณาข้างต้น บทความนี้ใช้ระบบควบคุมดิจิทัลที่มี DSP เป็นแกนหลักในการควบคุมวงจรเรียงกระแส
2 คุณสมบัติหลักของ TMS320F240
3 PWM วงจรเรียงกระแสหลักและรูปแบบการควบคุม
วงจรหลักในบทความนี้ใช้โครงสร้างแบบฟูลบริดจ์แบบเฟสเดียว ดังแสดงในรูปที่ 1
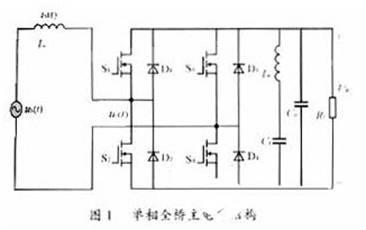
ในรูป uN
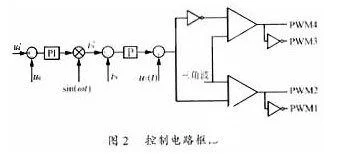
หลักการควบคุมเฉพาะมีคำอธิบายสั้น ๆ ดังนี้: ความเบี่ยงเบนของค่าสุ่มตัวอย่างแรงดันไฟขาออก (ud) และแรงดันอ้างอิงที่กำหนด (ud*) จะถูกส่งไปยังตัวควบคุม PI และใช้ค่าที่ได้รับเป็นแอมพลิจูดของกระแสอ้างอิง สัญญาณคูณด้วยเฟสเดียวกับแรงดันไฟของแหล่งจ่ายไฟ หลังจากสัญญาณไซน์อ้างอิง[sin(ωt)]จะใช้เป็นค่าของกระแสอ้างอิง ค่าสุ่มตัวอย่างกระแสอินพุตได้มาจากวงจรเหนี่ยวนำ และสัญญาณข้อผิดพลาดปัจจุบันจะถูกส่งไปยังตัวควบคุมตามสัดส่วน ค่าเอาต์พุตจะถูกเพิ่มด้วยสัญญาณชดเชยแรงดันไฟขาเข้า[uT
วงจรหน่วยตรวจจับและปรับสภาพปัจจุบันที่แสดงในรูปที่ 4 หลังจากที่สัญญาณกระแสเอาต์พุตของเซ็นเซอร์ปัจจุบันถูกแปลงเป็นสัญญาณแรงดันไฟโดยการวัดความต้านทาน RM อัตราขยายของแอมพลิฟายเออร์ที่เกิดจากแอมพลิฟายเออร์ปฏิบัติการ U8 จะถูกกำหนดโดยค่าของ RM เพื่อให้สัญญาณไบโพลาร์เอาท์พุตอยู่ในช่วง ±5V แอมพลิฟายเออร์สำหรับปฏิบัติการ U9 ประกอบขึ้นเป็นขั้นตอนการแปลงขั้วระดับ ซึ่งแปลงสัญญาณไบโพลาร์เป็นสัญญาณยูนิโพลาร์ตามสัดส่วน จำเป็นต้องใช้สัญญาณ unipolar 0~+5V สำหรับการแปลง DSPA/D และแหล่งจ่ายไฟ +5V นั้นจัดหาโดยแหล่งจ่ายไฟอ้างอิงที่ประกอบด้วย LM336 ตัวกรองความถี่ต่ำผ่านอย่างง่ายที่ประกอบด้วย RC เพื่อกรองฮาร์โมนิกย่อยของความถี่สวิตชิ่งของกระแสไฟเข้า AC และไดโอดสองตัวเป็นไดโอดหนีบ
หน่วยตรวจจับและปรับสภาพแรงดันไฟขาออก DC เป็นเซ็นเซอร์ส่วนหน้าแบบวงปิดสำหรับแรงดันไฟฝั่ง DC วัตถุประสงค์คือเพื่อวัดแรงดันตัวเก็บประจุด้าน DC เนื่องจากแรงดันไฟฟ้าของตัวเก็บประจุมีระลอกคลื่น จึงจำเป็นต้องแนะนำตัวกรองสัญญาณ หลักการของวงจรแสดงในรูปที่ 5
สัญญาณแรงดันไฟฟ้าอินพุต AC ใช้เป็นสัญญาณซิงโครไนซ์ เนื่องจากสัญญาณแรงดันไฟเข้าจากโครงข่ายไฟฟ้ามักจะไม่ใช่คลื่นไซน์บริสุทธิ์ จึงจำเป็นต้องกรองสัญญาณดังกล่าวเพื่อตรวจจับเฟสของแรงดันไฟฟ้าอินพุตของกริดพลังงานอย่างแม่นยำ ตัวกรองประกอบด้วยตัวกรองความถี่ต่ำและตัวกรองความถี่สูง ส่วนหนึ่ง. แอมพลิฟายเออร์ปฏิบัติการ U11A และเครือข่ายความต้านทาน-ความจุต่อพ่วงสร้างตัวกรองความถี่ต่ำผ่านอันดับสอง ตัวกรองความถี่ต่ำผ่านสามารถกรองฮาร์โมนิกที่มีลำดับสูงในสัญญาณอินพุตของโครงข่ายไฟฟ้า เพื่อให้รูปคลื่นได้รับการปรับปรุง แต่เฟสมีความล่าช้า ดังนั้นจึงแนะนำตัวกรองความถี่สูงผ่านเพื่อชดเชย U11B และเครือข่ายตัวเก็บประจุแบบตัวต้านทานต่อพ่วงสร้างตัวกรองความถี่สูงผ่านอันดับสอง จากวงจรจะเห็นได้ว่าโครงสร้างทอพอโลยีของตัวกรองความถี่สูงผ่านและตัวกรองความถี่ต่ำนั้นเหมือนกันทุกประการ และความต้านทานและความจุจะกระจายอย่างสมมาตร ตราบใดที่เลือกพารามิเตอร์ต่างๆ อย่างเหมาะสม เฟสนำของตัวกรองความถี่สูงผ่านสามารถชดเชยเฟสที่ล้าหลังของตัวกรองความถี่ต่ำได้ หลังจากการกรองสองครั้ง ไม่เพียงแต่จะกรองฮาร์โมนิกออกเท่านั้น รูปคลื่นจะอยู่ใกล้กับไซน์ และไม่มีการเปลี่ยนเฟส หลังจากกรองแล้ว จะผ่านวงจรฮิสเทรีซิสแบบไม่มีจุดตัดขวางเพื่อรับสัญญาณคลื่นสี่เหลี่ยมที่ซิงโครไนซ์กับสัญญาณอินพุตของโครงข่ายไฟฟ้าอย่างสมบูรณ์ วงจรแสดงในรูปที่ 6
นอกจากนี้ การตรวจจับค่าแรงดันไฟขาเข้าไม่ใช่ค่าแรงดันที่เกิดขึ้นทันที แต่เป็นค่าที่มีประสิทธิภาพ ดังนั้นวงจรเรียงกระแสที่มีความแม่นยำที่แสดงในรูปที่ 7 จะถูกใช้เพื่อแปลงสัญญาณแรงดันไฟที่กรองแล้วให้เป็นค่า DC ที่สอดคล้องกัน
CPU และวงจรต่อพ่วงส่วนใหญ่ประกอบด้วยวงจรนาฬิกา วงจรรีเซ็ต และอื่นๆ นอกจากนี้ เพื่อความสะดวกในการดีบัก ระบบนี้ได้ขยายชิป RAM 16 บิตเป็นหน่วยความจำโปรแกรม วงจรขับเคลื่อนมีบทบาทในการปรับปรุงความสามารถในการขับขี่และการแยกชีพจร วงจรลอจิกป้องกันช่วยให้มั่นใจได้ว่าเมื่อเกิดข้อผิดพลาด ระบบจะบล็อกสัญญาณพัลส์เอาต์พุตจากฮาร์ดแวร์ได้โดยตรง
5 การออกแบบซอฟต์แวร์ของระบบควบคุม
ซอฟต์แวร์ระบบควบคุมในบทความนี้ประกอบด้วยส่วนต่างๆ ดังต่อไปนี้เป็นหลัก:
1) โปรแกรมหลักส่วนใหญ่เสร็จสิ้นการเริ่มต้นระบบและการตรวจจับลูปของปริมาณอินพุตแต่ละรายการในระบบ
2) รูทีนย่อยการประมวลผลปัจจุบันส่วนใหญ่เสร็จสิ้นการประมวลผลข้อมูลของลูปควบคุมปัจจุบันในระบบควบคุม
3) รูทีนย่อยการประมวลผลแรงดันไฟฟ้าส่วนใหญ่เสร็จสิ้นการประมวลผลข้อมูลของลูปควบคุมแรงดันไฟฟ้าในระบบควบคุม
4) รูทีนย่อยการขัดจังหวะการซิงโครไนซ์จะใช้สัญญาณการซิงโครไนซ์เป็นแหล่งสัญญาณขัดจังหวะและตั้งค่าสถานะการซิงโครไนซ์เพื่อให้จังหวะการทำงานของซอฟต์แวร์ของระบบควบคุมทั้งหมดสอดคล้องกับแรงดันไฟฟ้าของกริด
5) ตัวจับเวลาขัดจังหวะรูทีนย่อย นี่คือส่วนหลักของโปรแกรมทั้งหมด ซึ่งสร้างคลื่น PWM ที่ต้องการตามผลลัพธ์ของแต่ละส่วนของการดำเนินการ
ผังงานซอฟต์แวร์แสดงในรูปที่ 8, 9 และ 10

6 ผลการทดลอง
บทความนี้ได้สร้างอุปกรณ์ทดลองที่ใช้พลังงานต่ำในห้องปฏิบัติการโดยใช้โครงร่างข้างต้น และพารามิเตอร์ของแต่ละส่วนมีดังนี้:
แรงดันไฟฟ้าขาเข้า AC 170V
แรงดันไฟขาออก DC 300V
กำลังขับ 360W
รูปคลื่นของแต่ละส่วนแสดงในรูปที่ 11 และ 12

ข้อสรุป 7
วงจรเรียงกระแส PWM เป็นตัวแปลงพลังงานชนิดใหม่ ซึ่งสามารถทำให้ตัวประกอบกำลังอินพุตใกล้เคียงกับ 1 บทความนี้ใช้วิธีการควบคุมการติดตามปัจจุบัน ออกแบบระบบควบคุมแบบดิจิตอลที่มีชิป DSP ประสิทธิภาพสูง TMS320F240 เป็นแกนหลัก และทำงานต่ำ - การทดลองกำลัง สุดท้าย การทดลองพิสูจน์ว่าระบบควบคุมมีข้อดีของการควบคุมที่ยืดหยุ่น ความแม่นยำสูง การตอบสนองแบบไดนามิกที่ดีและมีสัญญาณรบกวนน้อย
ลิงค์: R0878LS20K LMG6381QHGE