"PWM doğrultucu yeni bir güç türüdür Dönüştürücü Darbe genişliği modülasyonu uygulanarak geliştirildi teknoloji. Temel prensip, güç anahtarı tüpünün açma-kapama durumunu kontrol ederek doğrultucunun giriş akımını sinüs dalgasına yakın hale getirmektir. Voltaj aynı fazdadır, böylece mevcut harmoniklerin çoğu ortadan kaldırılır ve güç faktörü 1'e yakın hale getirilir. Bu makale, doğrultucunun dijital kontrolünü uygulamak için TI'nin TMS320F240DSP'sini kullanır. Bu yöntemin analog kontrole göre aşağıdaki avantajları vardır.
"
Yazar: Liu Yanzhu
1 Giriş
PWM doğrultucu, darbe genişliği modülasyon teknolojisi uygulanarak geliştirilen yeni bir güç dönüştürücü türüdür. Temel prensip, güç anahtarı tüpünün açık-kapalı durumunu kontrol ederek doğrultucunun giriş akımını sinüs dalgasına yakın hale getirmek ve akım ve voltajın aynı fazda olmasını sağlamak, böylece akım harmoniklerinin çoğunu ortadan kaldırmak ve güç faktörü 1'e yakın. Bu makale, doğrultucunun dijital kontrolünü uygulamak için TI'nin TMS320F240DSP'sini kullanıyor. Bu yöntemin analog kontrole göre aşağıdaki avantajları vardır:
1) Esnek kontrol Dijital kontrol sistemlerinde, yazılım algoritmaları esas olarak analog kontrolden daha esnek olan kontrol şemalarını uygulamak için kullanılır;
2) Yüksek güvenilirlik Mikrobilgisayar sistemi daha az bileşen kullanır ve tüm sinyaller dijital olarak işlenir, bu nedenle girişim küçüktür ve güvenilirlik yüksektir;
3) Arıza analizi kolaydır, sinyal tespiti elde edilen bilgileri saklar ve hatırlama yeteneğine sahiptir, bu nedenle arıza teşhisini gerçekleştirmek kolaydır;
4) Basit parametre ayarı, sistem hata ayıklama işlemini çok kolay hale getirebilir.
Yukarıdaki hususlara dayanarak, bu makale, doğrultucuyu kontrol etmek için çekirdek olarak DSP'li bir dijital kontrol sistemi kullanmaktadır.
2 TMS320F240'ın ana özellikleri
3 PWM doğrultucu ana devre ve kontrol şeması
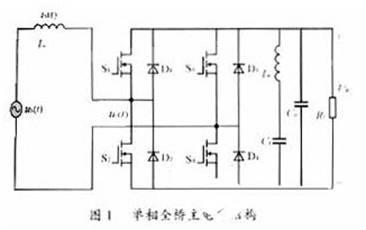
Bu makaledeki ana devre, Şekil 1'de gösterildiği gibi tek fazlı tam köprü yapısını benimser.


Şekilde, BM
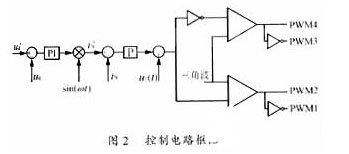

Spesifik kontrol prensibi kısaca şu şekilde açıklanmaktadır: Çıkış voltajı örnekleme değerinin (ud) ve verilen referans voltajının (ud*) sapması PI'ye gönderilir. regülatörve elde edilen değer, referans akım sinyalinin genliği olarak kullanılır ve güç kaynağı voltajıyla aynı fazla çarpılır. Referans sinüs sinyalinden sonra[sin(ωt)]referans akımının değeri olarak kullanılır. Giriş akımı örnekleme değeri endüktans devresinden elde edilir ve akım hata sinyali oransal regülatöre gönderilir. Çıkış değeri, giriş voltajı telafi sinyali[uT] ile eklenir.


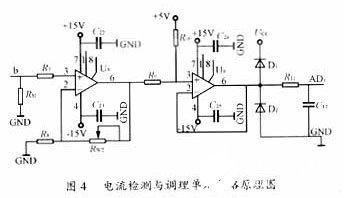
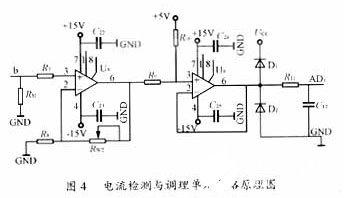
Akım algılama ve koşullandırma ünitesi devresi Şekil 4'te gösterilmektedir. Akımın çıkış akımı sinyali alındıktan sonra algılayıcı ölçüm direnci RM tarafından bir voltaj sinyaline dönüştürülür, işlem yükselticisi U8 tarafından oluşturulan yükselticinin kazancı RM değeriyle belirlenir, böylece çift kutuplu çıkış sinyali ±5V aralığına düşebilir. Operasyonel yükselteç U9, iki kutuplu sinyali orantılı olarak tek kutuplu bir sinyale dönüştüren bir seviye polarite dönüşüm aşamasını oluşturur. DSPA/D dönüşümü için tek kutuplu 0~+5V sinyali gereklidir ve +5V güç kaynağı, LM336'dan oluşan referans güç kaynağı tarafından sağlanır. AC giriş akımının anahtarlama frekansının alt harmoniklerini filtrelemek için RC'den oluşan basit bir alçak geçiş filtresi ve iki diyot, kenetleme diyotlarıdır.

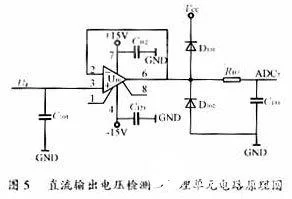
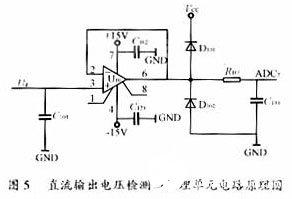
DC çıkış voltajı algılama ve koşullandırma ünitesi, DC tarafı voltajı için kapalı devre bir ön uç sensördür. Amaç DC tarafını ölçmektir. kondansatör Gerilim. Kapasitör voltajı belirli bir dalgalanma içerdiğinden, bir filtreleme bağlantısı eklemesi gerekir. Devre prensibi Şekil 5'te gösterilmektedir.

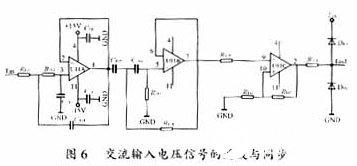
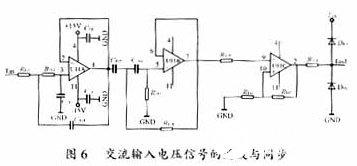
AC giriş voltajı sinyali senkronizasyon sinyali olarak kullanılır. Elektrik şebekesinden gelen voltaj sinyali girişi genellikle saf sinüs dalgası olmadığından, elektrik şebekesi giriş voltajının fazını doğru bir şekilde tespit etmek için filtrelenmesi gerekir. Filtre, bir alçak geçiş filtresi ve bir yüksek geçiş filtresi içerir. parça. İşlemsel yükselteç U11A ve çevresel direnç-kapasitans ağı, ikinci dereceden bir alçak geçiş filtresi oluşturur. Alçak geçiş filtresi, güç şebekesinin giriş sinyalindeki yüksek dereceli harmonikleri filtreleyebilir, böylece dalga biçimi iyileştirilir, ancak faz gecikir, bu nedenle telafi için bir yüksek geçiş filtresi eklenir. U11B ve çevre birimi rezistans-kapasitör ağı ikinci dereceden bir yüksek geçiş filtresi oluşturur. Devreden yüksek geçişli ve alçak geçişli filtrelerin topolojik yapısının tamamen aynı olduğu, direnç ve kapasitansın simetrik olarak dağıldığı görülmektedir. Çeşitli parametreler uygun şekilde seçildiği sürece, yüksek geçişli filtrenin ön aşaması, alçak geçişli filtrenin gecikme aşamasını ancak dengeleyebilir. İki kez filtrelemeden sonra yalnızca harmonikler filtrelenmekle kalmaz, dalga biçimi sinüse yakındır ve faz kayması olmaz. Filtrelemeden sonra sıfır geçiş histerezis devresinden geçerek elektrik şebekesinin giriş sinyaliyle tamamen senkronize olan bir kare dalga sinyali elde eder. Devre Şekil 6'da gösterilmiştir.

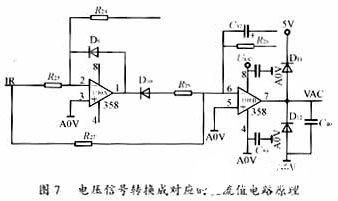
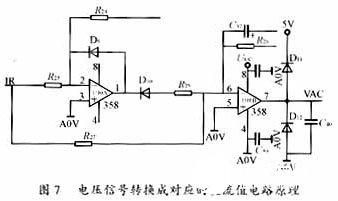
Ayrıca giriş voltajı değerinin tespiti, voltajın anlık değeri değil etkin değeridir, dolayısıyla Şekil 7'de gösterilen hassas doğrultucu devresi, filtrelenmiş voltaj sinyalini karşılık gelen DC değerine dönüştürmek için kullanılır.

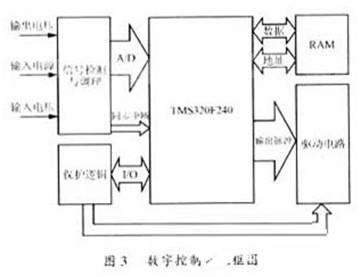
CPU ve çevre birimleri temel olarak saat devrelerini, sıfırlama devrelerini vb. içerir. Ek olarak, hata ayıklama kolaylığı için bu sistem aynı zamanda program belleği olarak 16 bitlik bir RAM yongasını da genişletmiştir. Sürüş devresi, sürüş kabiliyetinin ve darbe izolasyonunun geliştirilmesinde rol oynar. Koruma mantık devresi, bir arıza oluştuğunda sistemin donanımdan gelen çıkış darbe sinyalini doğrudan bloke edebilmesini sağlar.
5 Kontrol sisteminin yazılım tasarımı
Bu makaledeki kontrol sistemi yazılımı temel olarak aşağıdaki bölümleri içerir:
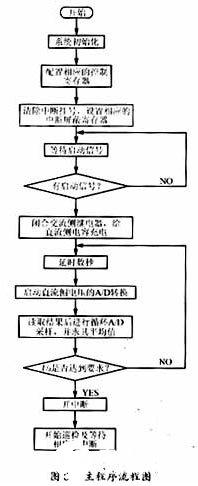
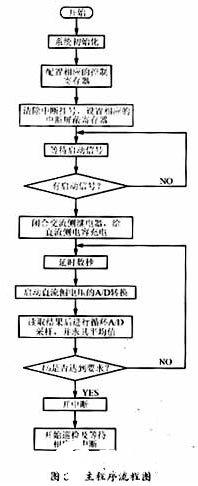
1) Ana program temel olarak sistemin başlatılmasını ve sistemdeki her giriş miktarının döngü tespitini tamamlar;
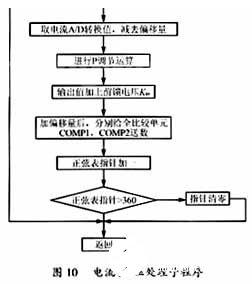
2) Mevcut işleme alt rutini esas olarak kontrol sistemindeki mevcut kontrol döngüsünün veri işlemesini tamamlar;
3) Gerilim işleme alt yordamı esas olarak kontrol sistemindeki gerilim kontrol döngüsünün veri işlemesini tamamlar;
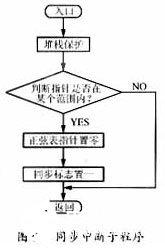
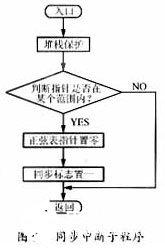
4) Senkronizasyon kesme alt programı, senkronizasyon sinyalini kesme kaynağı olarak alır ve senkronizasyon bayrağını, tüm kontrol sisteminin yazılım çalışma ritmini şebeke voltajıyla tutarlı tutacak şekilde ayarlar;
5) Zamanlayıcı kesme alt programı. Bu, operasyonun her bir bölümünün sonuçlarına göre gerekli PWM dalgalarını üreten tüm programın temel parçasıdır.
Yazılım akış şeması Şekil 8, 9 ve 10'da gösterilmektedir.



6 Deneysel sonuçlar
Bu makale, yukarıdaki şemayı kullanarak laboratuvarda düşük güçlü bir deney cihazı oluşturdu ve her parçanın parametreleri aşağıdaki gibidir:
Giriş voltajı AC 170V
Çıkış voltajıDC 300V
Çıkış gücü 360W
Her parçanın dalga biçimleri Şekil 11 ve 12'de gösterilmektedir.


7 Sonuç
PWM doğrultucu, giriş güç faktörünü 1'e yakın hale getirebilen yeni bir güç dönüştürücü türüdür. Bu makale mevcut izleme kontrol yöntemini benimser, çekirdek olarak yüksek performanslı DSP çipi TMS320F240 ile bir dijital kontrol sistemi tasarlar ve düşük iletkenlik sağlar. -güç deneyleri. Son olarak deney, kontrol sisteminin esnek kontrol, yüksek hassasiyet, iyi dinamik tepki ve az müdahale gibi avantajlara sahip olduğunu kanıtlıyor.
Yazar: Liu Yanzhu
1 Giriş
PWM doğrultucu, darbe genişliği modülasyon teknolojisi uygulanarak geliştirilen yeni bir güç dönüştürücü türüdür. Temel prensip, güç anahtarı tüpünün açık-kapalı durumunu kontrol ederek doğrultucunun giriş akımını sinüs dalgasına yakın hale getirmek ve akım ve voltajın aynı fazda olmasını sağlamak, böylece akım harmoniklerinin çoğunu ortadan kaldırmak ve güç faktörü 1'e yakın. Bu makale, doğrultucunun dijital kontrolünü uygulamak için TI'nin TMS320F240DSP'sini kullanıyor. Bu yöntemin analog kontrole göre aşağıdaki avantajları vardır:
1) Esnek kontrol Dijital kontrol sistemlerinde, yazılım algoritmaları esas olarak analog kontrolden daha esnek olan kontrol şemalarını uygulamak için kullanılır;
2) Yüksek güvenilirlik Mikrobilgisayar sistemi daha az bileşen kullanır ve tüm sinyaller dijital olarak işlenir, bu nedenle girişim küçüktür ve güvenilirlik yüksektir;
3) Arıza analizi kolaydır, sinyal tespiti elde edilen bilgileri saklar ve hatırlama yeteneğine sahiptir, bu nedenle arıza teşhisini gerçekleştirmek kolaydır;
4) Basit parametre ayarı, sistem hata ayıklama işlemini çok kolay hale getirebilir.
Yukarıdaki hususlara dayanarak, bu makale, doğrultucuyu kontrol etmek için çekirdek olarak DSP'li bir dijital kontrol sistemi kullanmaktadır.
2 TMS320F240'ın ana özellikleri
3 PWM doğrultucu ana devresi ve kontrol şeması
Bu makaledeki ana devre, Şekil 1'de gösterildiği gibi tek fazlı tam köprü yapısını benimser.
Şekilde, BM
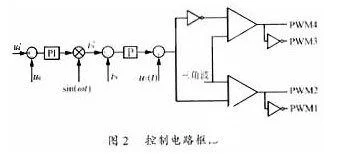
Spesifik kontrol prensibi kısaca şu şekilde anlatılmaktadır: Çıkış voltajı örnekleme değerinin (ud) ve verilen referans voltajının (ud*) sapması PI regülatörüne gönderilir ve elde edilen değer, referans akımın genliği olarak kullanılır. sinyal, güç kaynağı voltajı ile aynı faz ile çarpılır. Referans sinüs sinyalinden sonra[sin(ωt)]referans akımının değeri olarak kullanılır. Giriş akımı örnekleme değeri endüktans devresinden elde edilir ve akım hata sinyali oransal regülatöre gönderilir. Çıkış değeri, giriş voltajı telafi sinyali[uT] ile eklenir.
Şekil 4'te gösterilen akım algılama ve koşullandırma ünitesi devresi. Akım sensörünün çıkış akım sinyali, ölçüm direnci RM tarafından voltaj sinyaline dönüştürüldükten sonra işlemsel yükselteç U8'in oluşturduğu yükselticinin kazancı, RM değeri ile belirlenir. böylece çıkış bipolar sinyali ±5V aralığına düşebilir. Operasyonel yükselteç U9, iki kutuplu sinyali orantılı olarak tek kutuplu bir sinyale dönüştüren bir seviye polarite dönüşüm aşamasını oluşturur. DSPA/D dönüşümü için tek kutuplu 0~+5V sinyali gereklidir ve +5V güç kaynağı, LM336'dan oluşan referans güç kaynağı tarafından sağlanır. AC giriş akımının anahtarlama frekansının alt harmoniklerini filtrelemek için RC'den oluşan basit bir alçak geçiş filtresi ve iki diyot, kenetleme diyotlarıdır.
DC çıkış voltajı algılama ve koşullandırma ünitesi, DC tarafı voltajı için kapalı devre bir ön uç sensördür. Amaç DC tarafındaki kapasitör voltajını ölçmektir. Kapasitör voltajı belirli bir dalgalanma içerdiğinden, bir filtreleme bağlantısı eklemesi gerekir. Devre prensibi Şekil 5'te gösterilmektedir.
AC giriş voltajı sinyali senkronizasyon sinyali olarak kullanılır. Elektrik şebekesinden gelen voltaj sinyali girişi genellikle saf sinüs dalgası olmadığından, elektrik şebekesi giriş voltajının fazını doğru bir şekilde tespit etmek için filtrelenmesi gerekir. Filtre, bir alçak geçiş filtresi ve bir yüksek geçiş filtresi içerir. parça. İşlemsel yükselteç U11A ve çevresel direnç-kapasitans ağı, ikinci dereceden bir alçak geçiş filtresi oluşturur. Alçak geçiş filtresi, güç şebekesinin giriş sinyalindeki yüksek dereceli harmonikleri filtreleyebilir, böylece dalga biçimi iyileştirilir, ancak faz gecikir, bu nedenle telafi için bir yüksek geçiş filtresi eklenir. U11B ve çevresel direnç-kapasitör ağı, ikinci dereceden bir yüksek geçiş filtresi oluşturur. Devreden yüksek geçişli ve alçak geçişli filtrelerin topolojik yapısının tamamen aynı olduğu, direnç ve kapasitansın simetrik olarak dağıldığı görülmektedir. Çeşitli parametreler uygun şekilde seçildiği sürece, yüksek geçişli filtrenin ön aşaması, alçak geçişli filtrenin gecikme aşamasını ancak dengeleyebilir. İki kez filtrelemeden sonra yalnızca harmonikler filtrelenmekle kalmaz, dalga biçimi sinüse yakındır ve faz kayması olmaz. Filtrelemeden sonra sıfır geçiş histerezis devresinden geçerek elektrik şebekesinin giriş sinyaliyle tamamen senkronize olan bir kare dalga sinyali elde eder. Devre Şekil 6'da gösterilmiştir.
Ayrıca giriş voltajı değerinin tespiti, voltajın anlık değeri değil etkin değeridir, dolayısıyla Şekil 7'de gösterilen hassas doğrultucu devresi, filtrelenmiş voltaj sinyalini karşılık gelen DC değerine dönüştürmek için kullanılır.
CPU ve çevre birimleri temel olarak saat devrelerini, sıfırlama devrelerini vb. içerir. Ek olarak, hata ayıklama kolaylığı için bu sistem aynı zamanda program belleği olarak 16 bitlik bir RAM yongasını da genişletmiştir. Sürüş devresi, sürüş kabiliyetinin ve darbe izolasyonunun geliştirilmesinde rol oynar. Koruma mantık devresi, bir arıza oluştuğunda sistemin donanımdan gelen çıkış darbe sinyalini doğrudan bloke edebilmesini sağlar.
5 Kontrol sisteminin yazılım tasarımı
Bu makaledeki kontrol sistemi yazılımı temel olarak aşağıdaki bölümleri içerir:
1) Ana program temel olarak sistemin başlatılmasını ve sistemdeki her giriş miktarının döngü tespitini tamamlar;
2) Mevcut işleme alt rutini esas olarak kontrol sistemindeki mevcut kontrol döngüsünün veri işlemesini tamamlar;
3) Gerilim işleme alt yordamı esas olarak kontrol sistemindeki gerilim kontrol döngüsünün veri işlemesini tamamlar;
4) Senkronizasyon kesme alt programı, senkronizasyon sinyalini kesme kaynağı olarak alır ve tüm kontrol sisteminin yazılım çalışma ritmini şebeke voltajıyla tutarlı tutacak şekilde senkronizasyon bayrağını ayarlar;
5) Zamanlayıcı kesme alt programı. Bu, operasyonun her bir bölümünün sonuçlarına göre gerekli PWM dalgalarını üreten tüm programın temel parçasıdır.
Yazılım akış şeması Şekil 8, 9 ve 10'da gösterilmektedir.

6 Deneysel sonuçlar
Bu makale, yukarıdaki şemayı kullanarak laboratuvarda düşük güçlü bir deney cihazı oluşturdu ve her parçanın parametreleri aşağıdaki gibidir:
Giriş voltajı AC 170V
Çıkış voltajıDC 300V
Çıkış gücü 360W
Her parçanın dalga biçimleri Şekil 11 ve 12'de gösterilmektedir.

7 Sonuç
PWM doğrultucu, giriş güç faktörünü 1'e yakın hale getirebilen yeni bir güç dönüştürücü türüdür. Bu makale mevcut izleme kontrol yöntemini benimser, çekirdek olarak yüksek performanslı DSP çipi TMS320F240 ile bir dijital kontrol sistemi tasarlar ve düşük iletkenlik sağlar. -güç deneyleri. Son olarak deney, kontrol sisteminin esnek kontrol, yüksek hassasiyet, iyi dinamik tepki ve az müdahale gibi avantajlara sahip olduğunu kanıtlıyor.
Bağlantılar: R0878LS20K LMG6381QHGE