"PWM-gelijkrichter is een nieuw type vermogen omvormer ontwikkeld door toepassing van pulsbreedtemodulatie technologie. Het basisprincipe is om de ingangsstroom van de gelijkrichter dicht bij een sinusgolf te brengen door de aan-uit-status van de stroomschakelaarbuis te regelen, en de stroom en spanning bevinden zich in dezelfde fase, waardoor de meeste huidige harmonischen worden geëlimineerd en de arbeidsfactor dicht bij 1 komt. Dit artikel gebruikt TI's TMS320F240DSP om digitale besturing van de gelijkrichter te implementeren. Deze methode heeft de volgende voordelen ten opzichte van analoge besturing.
"
Auteur: Liu Yanzhu
1 Inleiding
PWM-gelijkrichter is een nieuw type vermogensomvormer ontwikkeld door toepassing van pulsbreedtemodulatietechnologie. Het basisprincipe is om de ingangsstroom van de gelijkrichter dicht bij een sinusgolf te brengen door de aan-uit-status van de aan / uit-schakelaarbuis te regelen, en de stroom en spanning bevinden zich in dezelfde fase, waardoor de meeste huidige harmonischen worden geëlimineerd en maken de arbeidsfactor dicht bij 1. Dit artikel gebruikt TI's TMS320F240DSP om digitale besturing van de gelijkrichter te implementeren. Deze methode heeft de volgende voordelen ten opzichte van analoge besturing:
1) Flexibele besturing In digitale besturingssystemen worden software-algoritmen voornamelijk gebruikt om besturingsschema's te implementeren, die flexibeler zijn dan analoge besturing;
2) Hoge betrouwbaarheid Het microcomputersysteem gebruikt minder componenten en alle signalen worden digitaal verwerkt, dus de interferentie is klein en de betrouwbaarheid is hoog;
3) Foutanalyse is eenvoudig, signaaldetectie slaat de verkregen informatie op en heeft de mogelijkheid om te onthouden, dus het is gemakkelijk om een foutdiagnose te realiseren;
4) Eenvoudige parameterinstelling kan systeemfoutopsporing erg handig maken.
Op basis van bovenstaande overwegingen maakt dit artikel gebruik van een digitaal besturingssysteem met DSP als kern om de gelijkrichter aan te sturen.
2 Belangrijkste kenmerken van TMS320F240
3 PWM gelijkrichter hoofd circuit en controleschema
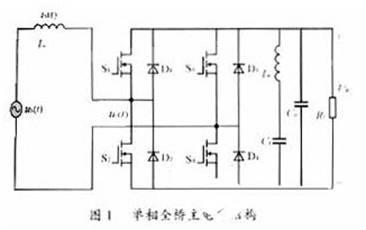
Het hoofdcircuit in dit artikel neemt een enkelfasige volledige brugstructuur aan, zoals weergegeven in figuur 1.


In de figuur, uN
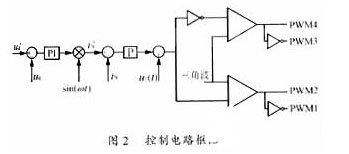

Het specifieke regelprincipe wordt als volgt kort beschreven: De afwijking van de bemonsteringswaarde van de uitgangsspanning (ud) en de gegeven referentiespanning (ud*) wordt naar de PI gestuurd regelaar, en de verkregen waarde wordt gebruikt als de amplitude van het referentiestroomsignaal, vermenigvuldigd met dezelfde fase als de voedingsspanning. Na het referentiesinussignaal [sin(ωt)] wordt deze gebruikt als de waarde van de referentiestroom. De bemonsteringswaarde van de ingangsstroom wordt verkregen uit het inductiecircuit en het stroomfoutsignaal wordt naar de proportionele regelaar gestuurd. De uitgangswaarde wordt opgeteld bij het ingangsspanningscompensatiesignaal [uT


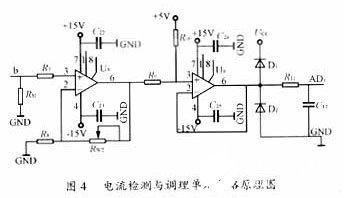
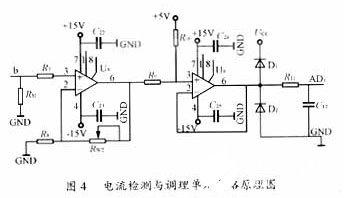
Stroomdetectie- en conditioneringseenheid weergegeven in figuur 4. Na het uitgangsstroomsignaal van de stroom sensor wordt omgezet in een spanningssignaal door de meetweerstand RM, wordt de versterking van de versterker gevormd door de operationele versterker U8 bepaald door de waarde van RM, zodat het bipolaire uitgangssignaal binnen het bereik van ±5V kan vallen. De operationele versterker U9 vormt een niveau-polariteit-conversietrap, die het bipolaire signaal proportioneel omzet in een unipolair signaal. Het unipolaire 0~+5V-signaal is vereist voor DSPA/D-conversie, en de +5V-voeding wordt geleverd door de referentievoeding bestaande uit LM336. Een eenvoudig laagdoorlaatfilter bestaande uit RC om de subharmonischen van de schakelfrequentie van de AC-ingangsstroom uit te filteren, en de twee diodes zijn klemdiodes.

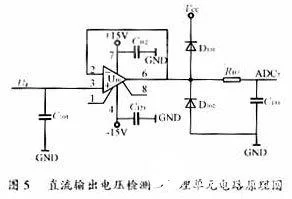
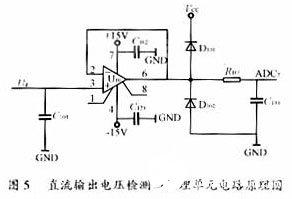
De DC-uitgangsspanningsdetectie- en conditioneringseenheid is een front-endsensor met gesloten lus voor de DC-zijdespanning. Het doel is om de DC-zijde te meten condensator Spanning. Omdat de condensatorspanning een bepaalde rimpel bevat, moet deze een filterverbinding introduceren. Het circuitprincipe wordt getoond in Figuur 5.

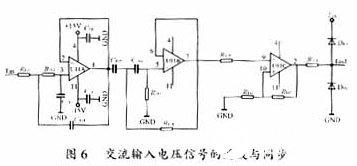
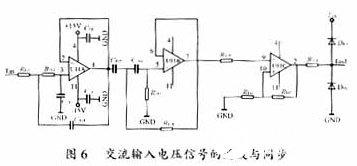
Het AC-ingangsspanningssignaal wordt gebruikt als synchronisatiesignaal. Omdat het ingangsspanningssignaal van het elektriciteitsnet vaak geen zuivere sinusgolf is, moet het worden gefilterd om de fase van de ingangsspanning van het elektriciteitsnet nauwkeurig te detecteren. Het filter bevat een laagdoorlaatfilter en een hoogdoorlaatfilter. deel. De operationele versterker U11A en het perifere weerstand-capaciteitsnetwerk vormen een laagdoorlaatfilter van de tweede orde. Het laagdoorlaatfilter kan hogere harmonischen in het ingangssignaal van het elektriciteitsnet wegfilteren, waardoor de golfvorm verbetert, maar de fase achterblijft, daarom wordt ter compensatie een hoogdoorlaatfilter geïntroduceerd. U11B en zijn randapparatuur Weerstand-condensatornetwerk vormen een tweede-orde hoogdoorlaatfilter. Uit de schakeling is te zien dat de topologische structuur van de hoogdoorlaat- en laagdoorlaatfilters exact hetzelfde zijn en dat de weerstand en capaciteit symmetrisch zijn verdeeld. Zolang de verschillende parameters op de juiste manier zijn geselecteerd, kan de leidende fase van het hoogdoorlaatfilter de achterblijvende fase van het laagdoorlaatfilter net compenseren. Na twee keer filteren worden niet alleen de harmonischen eruit gefilterd, de golfvorm benadert de sinus en er is geen faseverschuiving. Na filtering gaat het door het nuldoorgangshysteresecircuit om een blokgolfsignaal te verkrijgen dat volledig is gesynchroniseerd met het ingangssignaal van het elektriciteitsnet. De schakeling is weergegeven in figuur 6.

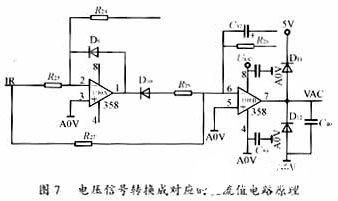
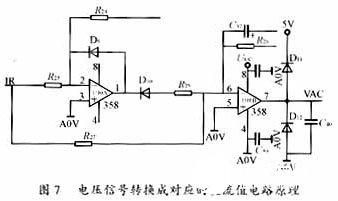
Bovendien is de detectie van de ingangsspanningswaarde niet de momentane waarde van de spanning, maar de effectieve waarde, dus het precisiegelijkrichtercircuit getoond in Fig. 7 wordt gebruikt om het gefilterde spanningssignaal om te zetten in de overeenkomstige DC-waarde.

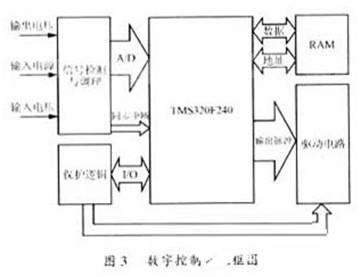
De CPU en zijn perifere circuits omvatten voornamelijk klokcircuits, resetcircuits, enzovoort. Bovendien heeft dit systeem voor het gemak van debuggen ook een 16-bits RAM-chip als programmageheugen uitgebreid. Het aandrijfcircuit speelt een rol bij het verbeteren van het aandrijfvermogen en de isolatie van de puls. Het logische beveiligingscircuit zorgt ervoor dat wanneer er een fout optreedt, het systeem het uitgangspulssignaal van de hardware direct kan blokkeren.
5 Software-ontwerp van het besturingssysteem
De besturingssysteemsoftware in dit artikel omvat voornamelijk de volgende onderdelen:
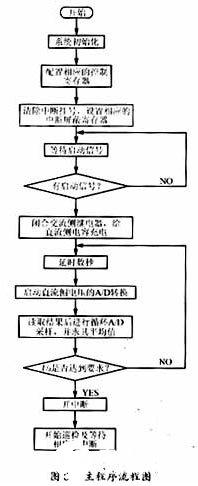
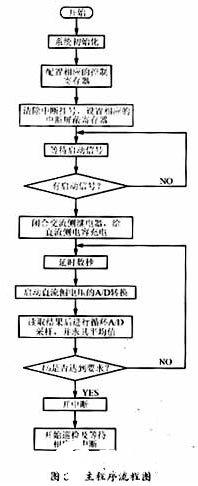
1) Het hoofdprogramma voltooit voornamelijk de initialisatie van het systeem en de lusdetectie van elke invoerhoeveelheid in het systeem;
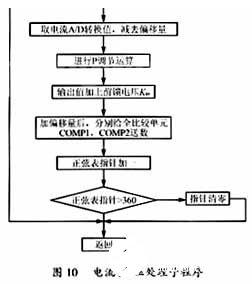
2) De huidige verwerkingssubroutine voltooit voornamelijk de gegevensverwerking van de huidige regellus in het regelsysteem;
3) De subroutine voor spanningsverwerking voltooit hoofdzakelijk de gegevensverwerking van de spanningsregellus in het besturingssysteem;
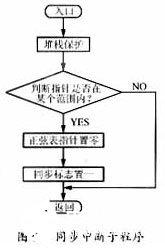
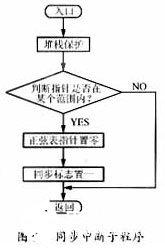
4) De synchronisatie-onderbrekingssubroutine neemt het synchronisatiesignaal als de onderbrekingsbron en stelt de synchronisatievlag in om het softwareritme van het gehele besturingssysteem consistent te houden met de netspanning;
5) Timeronderbrekingssubroutine. Dit is het kernonderdeel van het hele programma, dat de vereiste PWM-golven genereert op basis van de resultaten van elk onderdeel van de operatie.
Het softwarestroomschema wordt getoond in afbeeldingen 8, 9 en 10.



6 Experimentele resultaten
Met behulp van het bovenstaande schema heeft dit artikel een experimenteel apparaat met laag vermogen in het laboratorium gebouwd en de parameters van elk onderdeel zijn als volgt:
Ingangsspanning AC 170V
Uitgangsspanning DC 300V
Uitgangsvermogen 360W
De golfvormen van elk onderdeel worden getoond in figuren 11 en 12.


7 Conclusie
De PWM-gelijkrichter is een nieuw type stroomomvormer, die de ingangsvermogensfactor dicht bij 1 kan brengen. Dit document neemt de huidige tracking-controlemethode over, ontwerpt een digitaal besturingssysteem met hoogwaardige DSP-chip TMS320F240 als kern, en geleidt lage -kracht experimenten. Ten slotte bewijst het experiment dat het besturingssysteem de voordelen heeft van flexibele besturing, hoge precisie, goede dynamische respons en weinig interferentie.
Auteur: Liu Yanzhu
1 Inleiding
PWM-gelijkrichter is een nieuw type vermogensomvormer ontwikkeld door toepassing van pulsbreedtemodulatietechnologie. Het basisprincipe is om de ingangsstroom van de gelijkrichter dicht bij een sinusgolf te brengen door de aan-uit-status van de aan / uit-schakelaarbuis te regelen, en de stroom en spanning bevinden zich in dezelfde fase, waardoor de meeste huidige harmonischen worden geëlimineerd en maken de arbeidsfactor dicht bij 1. Dit artikel gebruikt TI's TMS320F240DSP om digitale besturing van de gelijkrichter te implementeren. Deze methode heeft de volgende voordelen ten opzichte van analoge besturing:
1) Flexibele besturing In digitale besturingssystemen worden software-algoritmen voornamelijk gebruikt om besturingsschema's te implementeren, die flexibeler zijn dan analoge besturing;
2) Hoge betrouwbaarheid Het microcomputersysteem gebruikt minder componenten en alle signalen worden digitaal verwerkt, dus de interferentie is klein en de betrouwbaarheid is hoog;
3) Foutanalyse is eenvoudig, signaaldetectie slaat de verkregen informatie op en heeft de mogelijkheid om te onthouden, dus het is gemakkelijk om een foutdiagnose te realiseren;
4) Eenvoudige parameterinstelling kan systeemfoutopsporing erg handig maken.
Op basis van bovenstaande overwegingen maakt dit artikel gebruik van een digitaal besturingssysteem met DSP als kern om de gelijkrichter aan te sturen.
2 Belangrijkste kenmerken van TMS320F240
3 PWM-gelijkrichter hoofdcircuit en besturingsschema
Het hoofdcircuit in dit artikel neemt een enkelfasige volledige brugstructuur aan, zoals weergegeven in figuur 1.
In de figuur, uN
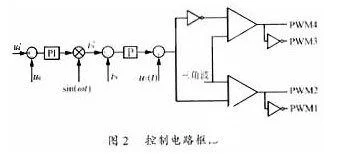
Het specifieke regelprincipe wordt als volgt kort beschreven: De afwijking van de uitgangsspanningsbemonsteringswaarde (ud) en de gegeven referentiespanning (ud*) wordt naar de PI-regelaar gestuurd en de verkregen waarde wordt gebruikt als de amplitude van de referentiestroom signaal, vermenigvuldigd met dezelfde fase als de voedingsspanning. Na het referentiesinussignaal [sin(ωt)] wordt dit gebruikt als de waarde van de referentiestroom. De bemonsteringswaarde van de ingangsstroom wordt verkregen uit het inductantiecircuit en het stroomfoutsignaal wordt naar de proportionele regelaar gestuurd. De uitgangswaarde wordt opgeteld bij het ingangsspanningscompensatiesignaal [uT
Stroomdetectie- en conditioneringseenheid weergegeven in figuur 4. Nadat het uitgangsstroomsignaal van de stroomsensor is omgezet in een spanningssignaal door de meetweerstand RM, wordt de versterking van de versterker gevormd door de operationele versterker U8 bepaald door de waarde van RM , zodat het bipolaire uitgangssignaal binnen het bereik van ± 5 V kan vallen. De operationele versterker U9 vormt een niveau-polariteit-conversietrap, die het bipolaire signaal proportioneel omzet in een unipolair signaal. Het unipolaire 0~+5V-signaal is vereist voor DSPA/D-conversie, en de +5V-voeding wordt geleverd door de referentievoeding bestaande uit LM336. Een eenvoudig laagdoorlaatfilter bestaande uit RC om de subharmonischen van de schakelfrequentie van de AC-ingangsstroom uit te filteren, en de twee diodes zijn klemdiodes.
De DC-uitgangsspanningsdetectie- en -conditioneringseenheid is een closed-loop front-end sensor voor de DC-zijspanning. Het doel is om de condensatorspanning aan de DC-zijde te meten. Omdat de condensatorspanning een bepaalde rimpel bevat, moet deze een filterverbinding introduceren. Het circuitprincipe wordt getoond in figuur 5.
Het AC-ingangsspanningssignaal wordt gebruikt als synchronisatiesignaal. Omdat het ingangsspanningssignaal van het elektriciteitsnet vaak geen zuivere sinusgolf is, moet het worden gefilterd om de fase van de ingangsspanning van het elektriciteitsnet nauwkeurig te detecteren. Het filter bevat een laagdoorlaatfilter en een hoogdoorlaatfilter. deel. De operationele versterker U11A en het perifere weerstand-capaciteitsnetwerk vormen een laagdoorlaatfilter van de tweede orde. Het laagdoorlaatfilter kan hogere harmonischen in het ingangssignaal van het elektriciteitsnet wegfilteren, waardoor de golfvorm verbetert, maar de fase achterblijft, daarom wordt ter compensatie een hoogdoorlaatfilter geïntroduceerd. U11B en zijn perifere weerstand-condensatornetwerk vormen een hoogdoorlaatfilter van de tweede orde. Uit het circuit blijkt dat de topologische structuur van de hoogdoorlaat- en laagdoorlaatfilters precies hetzelfde zijn, en dat de weerstand en capaciteit symmetrisch verdeeld zijn. Zolang de verschillende parameters op de juiste manier worden geselecteerd, kan de voorfase van het hoogdoorlaatfilter net de achterblijvende fase van het laagdoorlaatfilter compenseren. Na tweemaal filteren worden niet alleen de harmonischen eruit gefilterd, ligt de golfvorm dicht bij de sinus en is er geen faseverschuiving. Na filtering gaat het door het nuldoorgangshysteresiscircuit om een blokgolfsignaal te verkrijgen dat volledig gesynchroniseerd is met het ingangssignaal van het elektriciteitsnet. Het circuit wordt getoond in Figuur 6.
Bovendien is de detectie van de ingangsspanningswaarde niet de momentane waarde van de spanning, maar de effectieve waarde, dus het precisiegelijkrichtercircuit getoond in Fig. 7 wordt gebruikt om het gefilterde spanningssignaal om te zetten in de overeenkomstige DC-waarde.
De CPU en zijn perifere circuits omvatten voornamelijk klokcircuits, resetcircuits, enzovoort. Bovendien heeft dit systeem voor het gemak van debuggen ook een 16-bits RAM-chip als programmageheugen uitgebreid. Het aandrijfcircuit speelt een rol bij het verbeteren van het aandrijfvermogen en de isolatie van de puls. Het logische beveiligingscircuit zorgt ervoor dat wanneer er een fout optreedt, het systeem het uitgangspulssignaal van de hardware direct kan blokkeren.
5 Software-ontwerp van het besturingssysteem
De besturingssysteemsoftware in dit artikel omvat voornamelijk de volgende onderdelen:
1) Het hoofdprogramma voltooit voornamelijk de initialisatie van het systeem en de lusdetectie van elke invoerhoeveelheid in het systeem;
2) De huidige verwerkingssubroutine voltooit voornamelijk de gegevensverwerking van de huidige regellus in het regelsysteem;
3) De subroutine voor spanningsverwerking voltooit hoofdzakelijk de gegevensverwerking van de spanningsregellus in het besturingssysteem;
4) De synchronisatie-onderbrekingssubroutine neemt het synchronisatiesignaal als de onderbrekingsbron en stelt de synchronisatievlag in om het ritme van de softwarebewerking van het gehele besturingssysteem consistent te houden met de netspanning;
5) Timeronderbrekingssubroutine. Dit is het kernonderdeel van het hele programma, dat de vereiste PWM-golven genereert op basis van de resultaten van elk onderdeel van de operatie.
Het softwarestroomschema wordt getoond in afbeeldingen 8, 9 en 10.

6 Experimentele resultaten
Met behulp van het bovenstaande schema heeft dit artikel een experimenteel apparaat met laag vermogen in het laboratorium gebouwd en de parameters van elk onderdeel zijn als volgt:
Ingangsspanning AC 170V
Uitgangsspanning DC 300V
Uitgangsvermogen 360W
De golfvormen van elk onderdeel worden getoond in figuren 11 en 12.

7 Conclusie
De PWM-gelijkrichter is een nieuw type stroomomvormer, die de ingangsvermogensfactor dicht bij 1 kan brengen. Dit document neemt de huidige tracking-controlemethode over, ontwerpt een digitaal besturingssysteem met hoogwaardige DSP-chip TMS320F240 als kern, en geleidt lage -kracht experimenten. Ten slotte bewijst het experiment dat het besturingssysteem de voordelen heeft van flexibele besturing, hoge precisie, goede dynamische respons en weinig interferentie.
De connecties: R0878LS20K LMG6381QHGE