"Penerus PWM ialah jenis kuasa baharu Penukar dibangunkan dengan menggunakan modulasi lebar nadi teknologi. Prinsip asas adalah untuk menjadikan arus masukan penerus hampir kepada gelombang sinus dengan mengawal keadaan hidup-mati tiub suis kuasa, dan arus dan voltan berada dalam fasa yang sama, dengan itu menghapuskan kebanyakan harmonik semasa dan menjadikan faktor kuasa hampir 1. Artikel ini menggunakan TMS320F240DSP TI untuk melaksanakan kawalan digital penerus. Kaedah ini mempunyai kelebihan berikut berbanding kawalan analog.
"
Pengarang: Liu Yanzhu
1 Pengenalan
Penerus PWM ialah sejenis penukar kuasa baharu yang dibangunkan dengan menggunakan teknologi modulasi lebar denyut. Prinsip asas adalah untuk menjadikan arus masukan penerus hampir kepada gelombang sinus dengan mengawal keadaan hidup-mati tiub suis kuasa, dan arus dan voltan berada dalam fasa yang sama, dengan itu menghapuskan kebanyakan harmonik semasa dan membuat faktor kuasa hampir 1. Artikel ini menggunakan TMS320F240DSP TI untuk melaksanakan kawalan digital penerus. Kaedah ini mempunyai kelebihan berikut berbanding kawalan analog:
1) Kawalan fleksibel Dalam sistem kawalan digital, algoritma perisian digunakan terutamanya untuk melaksanakan skim kawalan, yang lebih fleksibel daripada kawalan analog;
2) Kebolehpercayaan yang tinggi Sistem mikrokomputer menggunakan lebih sedikit komponen dan semua isyarat diproses secara digital, jadi gangguan adalah kecil dan kebolehpercayaan adalah tinggi;
3) Analisis kesalahan adalah mudah, pengesanan isyarat akan menyimpan maklumat yang diperolehi, dan ia mempunyai keupayaan untuk mengingati, jadi mudah untuk merealisasikan diagnosis kesalahan;
4) Tetapan parameter mudah boleh menjadikan penyahpepijatan sistem berfungsi dengan sangat mudah.
Berdasarkan pertimbangan di atas, artikel ini menggunakan sistem kawalan digital dengan DSP sebagai teras untuk mengawal penerus.
2 Ciri utama TMS320F240
3 PWM penerus utama litar dan skim kawalan
Litar utama dalam artikel ini menggunakan struktur jambatan penuh fasa tunggal, seperti yang ditunjukkan dalam Rajah 1.


Dalam rajah tersebut, uN
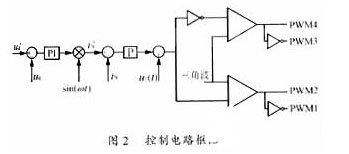

Prinsip kawalan khusus diterangkan secara ringkas seperti berikut: Sisihan nilai pensampelan voltan keluaran (ud) dan voltan rujukan yang diberikan (ud*) dihantar ke PI pengatur, dan nilai yang diperoleh digunakan sebagai amplitud isyarat arus rujukan, didarab dengan fasa yang sama dengan voltan bekalan kuasa Selepas isyarat sinus rujukan[sin(ωt)]ia digunakan sebagai nilai arus rujukan. Nilai pensampelan arus input diperoleh daripada litar induktansi, dan isyarat ralat semasa dihantar kepada pengawal selia berkadar. Nilai keluaran ditambah dengan isyarat pampasan voltan input[uT


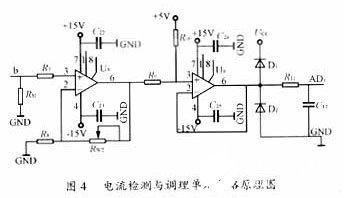
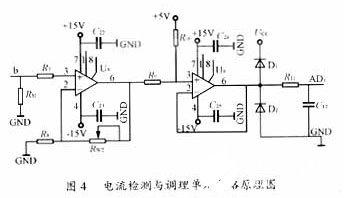
Pengesanan arus dan litar unit penyaman ditunjukkan dalam Rajah 4. Selepas isyarat arus keluaran arus sensor ditukarkan kepada isyarat voltan oleh rintangan pengukur RM, keuntungan penguat yang dibentuk oleh penguat kendalian U8 ditentukan oleh nilai RM, supaya isyarat bipolar keluaran boleh jatuh dalam julat ±5V. Penguat kendalian U9 membentuk peringkat penukaran kekutuban tahap, yang menukar isyarat bipolar kepada isyarat unipolar mengikut perkadaran. Isyarat unipolar 0~+5V diperlukan untuk penukaran DSPA/D, dan bekalan kuasa +5V dibekalkan oleh bekalan kuasa rujukan yang terdiri daripada LM336. Penapis laluan rendah ringkas yang terdiri daripada RC untuk menapis subharmonik frekuensi pensuisan arus input AC, dan kedua-dua diod adalah diod pengapit.

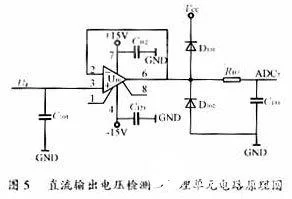
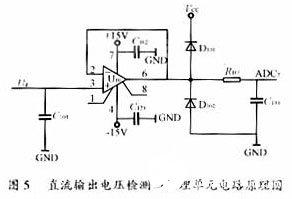
Unit pengesanan dan penyaman voltan keluaran DC ialah penderia hujung hadapan gelung tertutup untuk voltan sisi DC. Tujuannya adalah untuk mengukur sisi DC kapasitor voltan. Oleh kerana voltan kapasitor mengandungi riak tertentu, ia perlu memperkenalkan pautan penapisan. Prinsip litar ditunjukkan dalam Rajah 5.

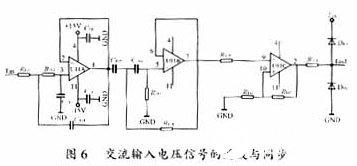
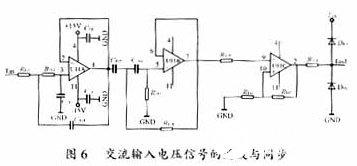
Isyarat voltan input AC digunakan sebagai isyarat penyegerakan. Memandangkan input isyarat voltan daripada grid kuasa selalunya bukan gelombang sinus tulen, ia mesti ditapis untuk mengesan dengan tepat fasa voltan input grid kuasa. Penapis termasuk penapis laluan rendah dan penapis laluan tinggi. bahagian. Penguat kendalian U11A dan rangkaian kapasitans rintangan periferi membentuk penapis laluan rendah tertib kedua. Penapis laluan rendah boleh menapis harmonik tertib tinggi dalam isyarat input grid kuasa, supaya bentuk gelombang dipertingkatkan, tetapi fasanya ketinggalan, jadi penapis laluan tinggi diperkenalkan untuk pampasan. U11B dan persisiannya Perintang-rangkaian kapasitor membentuk penapis laluan tinggi tertib kedua. Ia boleh dilihat dari litar bahawa struktur topologi penapis laluan tinggi dan laluan rendah adalah sama, dan rintangan dan kapasitansi diagihkan secara simetri. Selagi pelbagai parameter dipilih dengan sewajarnya, fasa utama penapis laluan tinggi hanya boleh mengimbangi fasa ketinggalan penapis laluan rendah. Selepas penapisan dua kali, bukan sahaja harmonik ditapis, bentuk gelombangnya hampir dengan sinus, dan tiada anjakan fasa. Selepas penapisan, ia melalui litar histeresis silang sifar untuk mendapatkan isyarat gelombang persegi yang disegerakkan sepenuhnya dengan isyarat input grid kuasa. Litar ditunjukkan dalam Rajah 6.

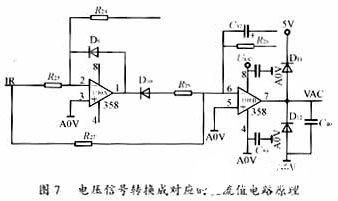
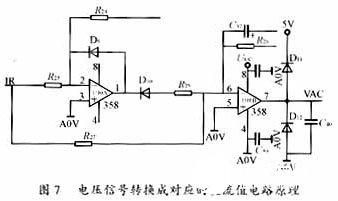
Di samping itu, pengesanan nilai voltan input bukanlah nilai voltan serta-merta tetapi nilai berkesan, jadi litar penerus ketepatan yang ditunjukkan dalam Rajah 7 digunakan untuk menukar isyarat voltan yang ditapis kepada nilai DC yang sepadan.

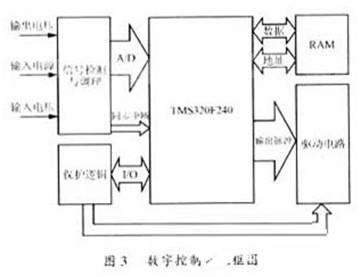
CPU dan litar persisian terutamanya termasuk litar jam, litar set semula dan sebagainya. Selain itu, untuk kemudahan penyahpepijatan, sistem ini juga telah mengembangkan cip RAM 16-bit sebagai memori program. Litar pemanduan memainkan peranan dalam meningkatkan keupayaan pemanduan dan pengasingan nadi. Litar logik perlindungan memastikan bahawa apabila berlaku kerosakan, sistem boleh terus menyekat isyarat nadi keluaran daripada perkakasan.
5 Reka bentuk perisian sistem kawalan
Perisian sistem kawalan dalam artikel ini terutamanya merangkumi bahagian berikut:
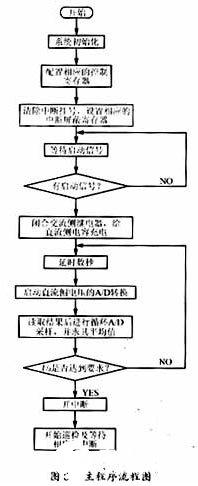
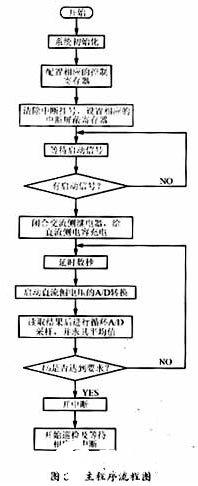
1) Program utama terutamanya melengkapkan permulaan sistem dan pengesanan gelung setiap kuantiti input dalam sistem;
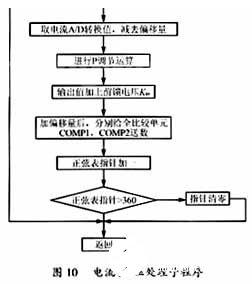
2) Subrutin pemprosesan semasa terutamanya melengkapkan pemprosesan data gelung kawalan semasa dalam sistem kawalan;
3) Subrutin pemprosesan voltan terutamanya melengkapkan pemprosesan data gelung kawalan voltan dalam sistem kawalan;
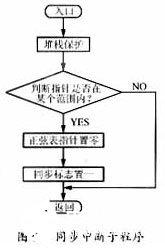
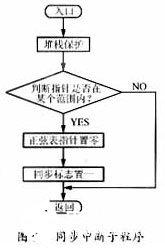
4) Subrutin gangguan penyegerakan mengambil isyarat penyegerakan sebagai sumber gangguan dan menetapkan bendera penyegerakan untuk memastikan perisian berjalan irama keseluruhan sistem kawalan selaras dengan voltan grid;
5) Subrutin gangguan pemasa. Ini adalah bahagian teras keseluruhan program, yang menjana gelombang PWM yang diperlukan mengikut keputusan setiap bahagian operasi.
Carta aliran perisian ditunjukkan dalam Rajah 8, 9, dan 10.



6 Keputusan eksperimen
Menggunakan skema di atas, artikel ini membina peranti percubaan berkuasa rendah di makmal, dan parameter setiap bahagian adalah seperti berikut:
Voltan masukan AC 170V
Voltan keluaran DC 300V
Kuasa output 360W
Bentuk gelombang setiap bahagian ditunjukkan dalam Rajah 11 dan 12.


Kesimpulan 7
Penerus PWM ialah jenis penukar kuasa baharu, yang boleh menjadikan faktor kuasa input hampir kepada 1. Kertas ini mengguna pakai kaedah kawalan penjejakan semasa, mereka bentuk sistem kawalan digital dengan cip DSP berprestasi tinggi TMS320F240 sebagai teras, dan menjalankan rendah -percubaan kuasa. Akhirnya, eksperimen membuktikan bahawa sistem kawalan mempunyai kelebihan kawalan fleksibel, ketepatan tinggi, tindak balas dinamik yang baik dan gangguan yang sedikit.
Pengarang: Liu Yanzhu
1 Pengenalan
Penerus PWM ialah sejenis penukar kuasa baharu yang dibangunkan dengan menggunakan teknologi modulasi lebar denyut. Prinsip asas adalah untuk menjadikan arus masukan penerus hampir kepada gelombang sinus dengan mengawal keadaan hidup-mati tiub suis kuasa, dan arus dan voltan berada dalam fasa yang sama, dengan itu menghapuskan kebanyakan harmonik semasa dan membuat faktor kuasa hampir 1. Artikel ini menggunakan TMS320F240DSP TI untuk melaksanakan kawalan digital penerus. Kaedah ini mempunyai kelebihan berikut berbanding kawalan analog:
1) Kawalan fleksibel Dalam sistem kawalan digital, algoritma perisian digunakan terutamanya untuk melaksanakan skim kawalan, yang lebih fleksibel daripada kawalan analog;
2) Kebolehpercayaan yang tinggi Sistem mikrokomputer menggunakan lebih sedikit komponen dan semua isyarat diproses secara digital, jadi gangguan adalah kecil dan kebolehpercayaan adalah tinggi;
3) Analisis kesalahan adalah mudah, pengesanan isyarat akan menyimpan maklumat yang diperolehi, dan ia mempunyai keupayaan untuk mengingati, jadi mudah untuk merealisasikan diagnosis kesalahan;
4) Tetapan parameter mudah boleh menjadikan penyahpepijatan sistem berfungsi dengan sangat mudah.
Berdasarkan pertimbangan di atas, artikel ini menggunakan sistem kawalan digital dengan DSP sebagai teras untuk mengawal penerus.
2 Ciri utama TMS320F240
3 litar utama penerus PWM dan skema kawalan
Litar utama dalam artikel ini menggunakan struktur jambatan penuh fasa tunggal, seperti yang ditunjukkan dalam Rajah 1.
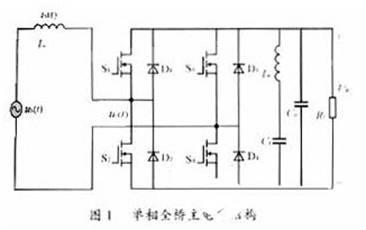
Dalam rajah tersebut, uN
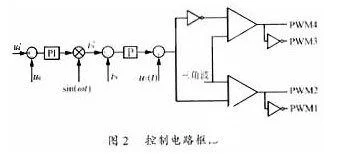
Prinsip kawalan khusus diterangkan secara ringkas seperti berikut: Sisihan nilai pensampelan voltan keluaran (ud) dan voltan rujukan yang diberikan (ud*) dihantar kepada pengawal selia PI, dan nilai yang diperoleh digunakan sebagai amplitud arus rujukan isyarat, didarab dengan fasa yang sama dengan voltan bekalan kuasa Selepas isyarat sinus rujukan[sin(ωt)]ia digunakan sebagai nilai arus rujukan. Nilai pensampelan arus input diperoleh daripada litar induktansi, dan isyarat ralat semasa dihantar kepada pengawal selia berkadar. Nilai keluaran ditambah dengan isyarat pampasan voltan input[uT
Pengesanan arus dan litar unit penyaman ditunjukkan dalam Rajah 4. Selepas isyarat arus keluaran penderia arus ditukarkan kepada isyarat voltan oleh rintangan pengukur RM, keuntungan penguat yang dibentuk oleh penguat kendalian U8 ditentukan oleh nilai RM , supaya isyarat bipolar keluaran boleh berada dalam julat ±5V. Penguat kendalian U9 membentuk peringkat penukaran kekutuban tahap, yang menukar isyarat bipolar kepada isyarat unipolar mengikut perkadaran. Isyarat unipolar 0~+5V diperlukan untuk penukaran DSPA/D, dan bekalan kuasa +5V dibekalkan oleh bekalan kuasa rujukan yang terdiri daripada LM336. Penapis laluan rendah ringkas yang terdiri daripada RC untuk menapis subharmonik frekuensi pensuisan arus input AC, dan kedua-dua diod adalah diod pengapit.
Unit pengesanan dan penyaman voltan keluaran DC ialah penderia hujung hadapan gelung tertutup untuk voltan sisi DC. Tujuannya adalah untuk mengukur voltan kapasitor sisi DC. Oleh kerana voltan kapasitor mengandungi riak tertentu, ia perlu memperkenalkan pautan penapisan. Prinsip litar ditunjukkan dalam Rajah 5.
Isyarat voltan input AC digunakan sebagai isyarat penyegerakan. Memandangkan input isyarat voltan daripada grid kuasa selalunya bukan gelombang sinus tulen, ia mesti ditapis untuk mengesan dengan tepat fasa voltan input grid kuasa. Penapis termasuk penapis laluan rendah dan penapis laluan tinggi. bahagian. Penguat kendalian U11A dan rangkaian kapasitans rintangan periferi membentuk penapis laluan rendah tertib kedua. Penapis laluan rendah boleh menapis harmonik tertib tinggi dalam isyarat input grid kuasa, supaya bentuk gelombang bertambah baik, tetapi fasanya ketinggalan, jadi penapis laluan tinggi diperkenalkan untuk pampasan. U11B dan rangkaian kapasitor periferalnya membentuk penapis laluan tinggi tertib kedua. Ia boleh dilihat dari litar bahawa struktur topologi penapis laluan tinggi dan laluan rendah adalah sama, dan rintangan dan kapasitansi diagihkan secara simetri. Selagi pelbagai parameter dipilih dengan sewajarnya, fasa utama penapis laluan tinggi hanya boleh mengimbangi fasa ketinggalan penapis laluan rendah. Selepas penapisan dua kali, bukan sahaja harmonik ditapis, bentuk gelombangnya hampir dengan sinus, dan tiada anjakan fasa. Selepas penapisan, ia melalui litar histeresis silang sifar untuk mendapatkan isyarat gelombang persegi yang disegerakkan sepenuhnya dengan isyarat input grid kuasa. Litar ditunjukkan dalam Rajah 6.
Di samping itu, pengesanan nilai voltan input bukanlah nilai voltan serta-merta tetapi nilai berkesan, jadi litar penerus ketepatan yang ditunjukkan dalam Rajah 7 digunakan untuk menukar isyarat voltan yang ditapis kepada nilai DC yang sepadan.
CPU dan litar persisian terutamanya termasuk litar jam, litar set semula dan sebagainya. Selain itu, untuk kemudahan penyahpepijatan, sistem ini juga telah mengembangkan cip RAM 16-bit sebagai memori program. Litar pemanduan memainkan peranan dalam meningkatkan keupayaan pemanduan dan pengasingan nadi. Litar logik perlindungan memastikan bahawa apabila berlaku kerosakan, sistem boleh terus menyekat isyarat nadi keluaran daripada perkakasan.
5 Reka bentuk perisian sistem kawalan
Perisian sistem kawalan dalam artikel ini terutamanya merangkumi bahagian berikut:
1) Program utama terutamanya melengkapkan permulaan sistem dan pengesanan gelung setiap kuantiti input dalam sistem;
2) Subrutin pemprosesan semasa terutamanya melengkapkan pemprosesan data gelung kawalan semasa dalam sistem kawalan;
3) Subrutin pemprosesan voltan terutamanya melengkapkan pemprosesan data gelung kawalan voltan dalam sistem kawalan;
4) Subrutin gangguan penyegerakan mengambil isyarat penyegerakan sebagai sumber gangguan dan menetapkan bendera penyegerakan untuk memastikan rentak operasi perisian keseluruhan sistem kawalan konsisten dengan voltan grid;
5) Subrutin gangguan pemasa. Ini adalah bahagian teras keseluruhan program, yang menjana gelombang PWM yang diperlukan mengikut keputusan setiap bahagian operasi.
Carta aliran perisian ditunjukkan dalam Rajah 8, 9, dan 10.

6 Keputusan eksperimen
Menggunakan skema di atas, artikel ini membina peranti percubaan berkuasa rendah di makmal, dan parameter setiap bahagian adalah seperti berikut:
Voltan masukan AC 170V
Voltan keluaran DC 300V
Kuasa output 360W
Bentuk gelombang setiap bahagian ditunjukkan dalam Rajah 11 dan 12.

Kesimpulan 7
Penerus PWM ialah jenis penukar kuasa baharu, yang boleh menjadikan faktor kuasa input hampir kepada 1. Kertas ini mengguna pakai kaedah kawalan penjejakan semasa, mereka bentuk sistem kawalan digital dengan cip DSP berprestasi tinggi TMS320F240 sebagai teras, dan menjalankan rendah -percubaan kuasa. Akhirnya, eksperimen membuktikan bahawa sistem kawalan mempunyai kelebihan kawalan fleksibel, ketepatan tinggi, tindak balas dinamik yang baik dan gangguan yang sedikit.
Pautan: R0878LS20K LMG6381QHGE