
In den letzten Jahren haben zahlreiche Robotiker weltweit versucht, Robotersysteme zu entwickeln, die den menschlichen Tastsinn künstlich nachbilden können. Darüber hinaus haben sie versucht, immer realistischere und fortschrittlichere bionische Gliedmaßen und humanoide Roboter zu schaffen, die weiche Materialien anstelle von starren Strukturen verwenden.
Trotz ihrer texturbezogenen Vorteile sind Roboterhände aus weichen Materialien oft nicht in der Lage, viele sensorische Informationen zu sammeln. Tatsächlich hat sich die Nachbildung der komplexen biologischen Mechanismen, die es dem Menschen ermöglichen, taktile Informationen über Objekte zu sammeln, bisher als große Herausforderung erwiesen.



Forscher der Beihang-Universität in Peking haben kürzlich eine neue taktile Sensorik entwickelt, die auf Roboterfinger aus weichen Materialien angewendet werden könnte. Dieser eingeführte Mechanismus wurde von der Propriozeption inspiriert, dem biologischen Mechanismus, der es Säugetieren ermöglicht, die Position und Bewegungen ihres Körpers wahrzunehmen oder sich ihrer bewusst zu sein.
"Die Idee hinter unserer jüngsten Forschung basiert auf dem Propriozeptions-Framework des Menschen, das unsere Körperposition und die Belastung unserer Sehnen / Gelenke bestimmt", sagte Chang Cheng, einer der Forscher, die die Studie durchgeführt haben, gegenüber TechXplore. „Denken Sie daran, wenn Sie eine Augenbinde anlegen und Ihre Ohren zudecken, können Sie immer noch Ihre Handhaltung, Armposition oder das Gewicht einer Einkaufstüte spüren. Diese Fähigkeit wird als Propriozeption bezeichnet. Wir haben an einem Forschungsprojekt zu Handprothesen gearbeitet und suchen nach Wegen, den Mangel an sensorischem Feedback bei bestehenden Handprothesen zu beheben.“
In der Vergangenheit korrelierten Robotikforscher die Propriozeption typischerweise nicht mit dem Tastsinn. Tatsächlich erlaubt der menschliche Mechanismus der Propriozeption keine besonders präzisen Reaktionen, weshalb der Mensch ihn wahrscheinlich nicht verwendet, um die Textur von Objekten oder Oberflächen zu erkennen.
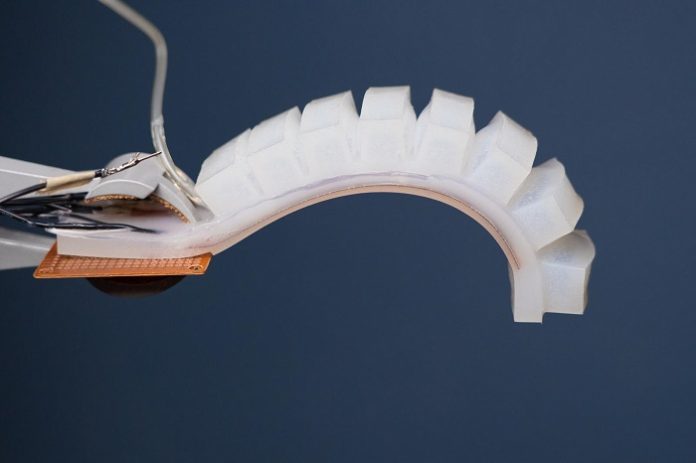
Da industrielle Sensoren jedoch weitaus empfindlicher sind als menschliche Propriozeptoren, könnte ihre Anwendung auf Roboterfinger den Forschern helfen, präziseres taktiles sensorisches Feedback zu erhalten. Das von Cheng und seinen Kollegen erstellte Prototypsystem besteht aus einem Linearaktuator, einer Sehne (oder einem Kabel), einer Dehnung Sensor und ein weicher Roboterfinger, der in einer ihrer früheren Arbeiten vorgestellt wurde.
„Die Sehne verbindet den Finger mit dem Aktuator und der Dehnungssensor ist in der Mitte der Sehne installiert“, sagte Cheng. „Wenn der Aktuator angetrieben wird, zieht er an der Sehne, wodurch der Finger gebeugt/gestreckt wird, und die Belastung der Sehne ändert sich entsprechend. Wenn der Finger verschiedene Gegenstände berührt, gibt der Sensor eine Reihe von Dehnungssignalen aus, die die berührten Gegenstände charakterisieren.“
Im Wesentlichen extrahiert die von den Forschern entwickelte Technik Merkmale aus den Messwerten des Sensors. Anschließend verwendet es Tools für maschinelles Lernen, um die Textur und Steifigkeit der Oberfläche oder des Objekts zu entschlüsseln, die der Roboterfinger berührt.
Cheng und seine Kollegen bewerteten ihre taktile Sensortechnik, indem sie eine Reihe von Tests mit dem von ihnen entwickelten Prototypsystem durchführten. Sie fanden heraus, dass ihre Technik die Textur und Steifigkeit mit hoher Genauigkeit (100 % bzw. 99.7 %) entschlüsseln konnte.
„Die meisten bestehenden Forschungen zur Innervation bionischer Finger schlugen vor, Sensoren auf der Fingerkuppenoberfläche zu installieren“, sagte Cheng. „Diese Studien haben zwar vielversprechende Ergebnisse geliefert, erfordern aber exakte Kontakte zwischen den Fingerkuppensensoren und den Objekten, die in der Praxis oft nicht gewährleistet werden können. Ein wesentlicher Vorteil unserer Studie besteht darin, dass sich die Sensoreinheit an der Sehne befindet, sodass ein Kontakt von einer beliebigen Stelle des Fingers zu einer charakterisierten Signalausgabe führt, die verwendet werden kann, um taktile Informationen abzuleiten.“
Die von diesem Forscherteam vorgestellte neue taktile Sensorik basiert auf der Einbettung von Sensoren in eine Robotersehne, ein bisher noch nie getesteter und vielversprechender Ansatz. In Zukunft könnte das von ihnen entwickelte System verwendet werden, um fortschrittlichere Roboter und Handprothesen zu entwickeln, die taktiles und propriozeptives Feedback sammeln können, ohne einen perfekten oder genauen Kontakt mit einer Oberfläche zu erfordern.
„Wir untersuchen jetzt die Möglichkeiten zur Erkennung von Schlupf dieses Systems“, sagte Cheng. „Wenn wir Menschen Dinge manipulieren oder greifen, ist Schlupf fast unvermeidlich, daher ist die Erkennung und Kontrolle von Schlupf für eine robuste und zuverlässige Steuerung von entscheidender Bedeutung. Wir glauben also, dass die Slippage-Erkennung eine nette Ergänzung wäre, und unsere vorläufigen Experimente haben wirklich vielversprechende Ergebnisse gezeigt.“
Neben der Weiterentwicklung ihres Systems arbeiten die Forscher mit einem renommierten Nanotechnologie-Labor an der Entwicklung einer kostengünstigen taktilen Sensor die Kraft-/Drehmomentsignale erfassen können und auf den Fingerspitzen des Roboters platziert werden können. Sie haben bereits einige Prototypen dieses Geräts erstellt und evaluieren nun seine Leistung.



