
Nuper multis roboticistae in orbe terrarum rationes roboticas evolvere conati sunt quae artificiose replicare sensum tactus humanum possunt. Praeterea magis magisque realistica et provecta membra bionica et robots humanoides creare conati sunt, mollibus materiis loco structurae rigidae adhibitis.
Quamvis commoda eorum textura relatas, roboticae manus e mollibus materiis factae, saepe colligere non possunt amplis notitias sensitivas. Reapse replicans machinas biologicas implicatas, quae homines permittunt ut notitias tangentes de rebus colligeret, probavit se valde provocasse quatenus.



Investigatores in Beihang University in Beijing nuper novam technicam sentiendi tangendi elaboraverunt, quae digitis roboticis e materia mollibus applicari posset. Haec machina, inducta, proprioceptionis inspirata, mechanismum biologicum permittit ut mammalia percipiat vel sentiret corporis sui positionis motusque.
"Nota post nostram recentem inquisitionem nititur ex proprioceptionis compage in hominibus inventae, quae est id quod determinat corpus nostrum situm et sarcinam in nervis/articulis" Chang Cheng, unus ex inquisitoribus qui perfecerunt studio TechXplore nuntiavit. “Cogita, cum velatum induas et aures obveles, sentire adhuc potes manum tuam positione brachii, vel quam grave sit macello; Haec facultas proprioceptionis nota est. Investigationis prothesticae manu laboravimus et exspectamus vias ad compellandos defectus sensus sensibilium in manibus protheticis existentibus."
Olim inquisitores robotici proprioceptionem cum sensu tactus proprie non correxerunt. Re quidem vera, humana mechanismus proprioceptionis propriae responsiones peculiariter praecise non permittit, quod fortasse est cur homines ea non utantur ad agnoscendum textura rerum vel superficierum.
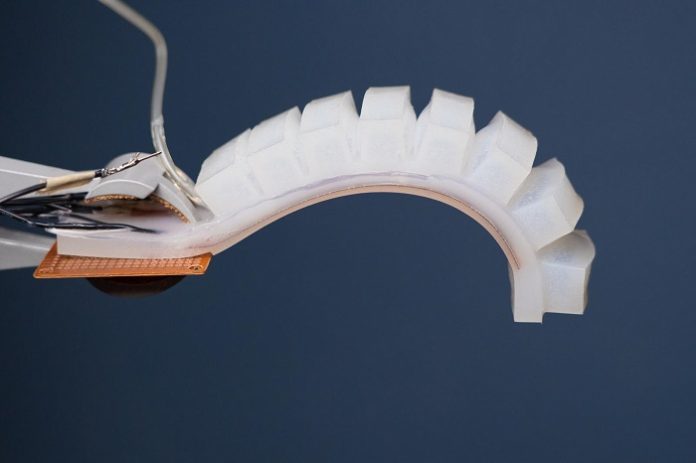
Cum sensores industriales longe sensibiles sunt, qui proprioceptores humanos adhibent, eos ad digitos roboticos adiuvandos inquisitoribus adiuvent ut sensus sensus tangentes subtilius colligant. Prototypum systematis Cheng et collegae creatum comprehenditur actuatoris linearis, tendinis (vel cable), iactatio. sensorem et mollis digitus roboticus introductus in una ex prioribus suis chartis.
"Tendona connectit digitum ad actus et contentionem sensorem in media tendine constituitur", dixit Cheng. "Auctor expulsus, tendinum trahit, quod digitum inflectere facit, et tendere in tendinis" mutatur. Cum digitus diversa obiecta tangat, sensorem eliquandi seriem significationibus quae tangibilia denotant.
Essentialiter ars ab inquisitoribus excogitata lineamenta e lectionis sensoris extrahit. Postmodum utitur machina instrumentorum discentium ad texturam et rigiditatem superficiei seu obiecti, quod digitus roboticus tangat.
Cheng et collegae sui artem sentiendi tangendi aestimabant per seriem testium currendo utendi prototypo systematis quod creaverunt. Invenerunt artem suam efficere posse textura et rigorem cum gradibus subtilitatis (100% et 99.7%, respective).
"Investigationes maxime exsistentes de digitis bionicis interioribus ad institutionem sensoriis in superficie digiti propositi", dixit Cheng. « Dum haec studia polliciti eventus cesserunt, notiones exigunt inter sensoriis et obiectis, quae saepe in praxi conservari non possunt. Praecipua utilitas studii nostri est ut unitas sensitiva in tendine sit, sic contactus alicunde digiti proveniet in signo notato output, quod adhiberi potest ad informationes tangentes colligendas.
Nova methodus tangendi sentiendi ab hac biga investigatoribus introducta nititur in cessione sensoriis in tendine robotico, accessu qui numquam antea probatus fuerat et se valde promittens invenit. In futurum, systema enucleata adhiberi possunt ad robots provectos et prostheticas manus, quae tangentes et proprios sensus colligere possunt, quin perfectam vel exactam contactum cum superficie requirunt.
"Iam lubricum detectionis facultatum huius systematis exploramus", Cheng dixit. "Cum homines res moliuntur aut capiuntur, lapsus pagina paene necessaria est, ergo detectio et lapsus moderatio robustis certaeque moderandis pendet. Ita deprehensio slippage lepidam notam addere credimus, et experimenta praevia nostra eventus promittentes revera demonstraverunt ».
Praeter systema enucleandum ulterius, investigatores operam dant cum lab notabili nanotechnologiae in progressu tangendi humili pretio. sensorem quae vis / torques sentire potest et in digitis roboticis imponi potest. Iam pauca huius artificii prototypa creaverunt et nunc suum effectum aestimant.



