
Nos últimos anos, vários roboticistas em todo o mundo têm tentado desenvolver sistemas robóticos que podem replicar artificialmente o sentido humano do tato. Além disso, eles têm tentado criar membros biônicos e robôs humanóides cada vez mais realistas e avançados, usando materiais macios em vez de estruturas rígidas.
Apesar de suas vantagens relacionadas à textura, as mãos robóticas feitas de materiais macios geralmente são incapazes de coletar uma ampla gama de informações sensoriais. Na verdade, replicar os complexos mecanismos biológicos que permitem aos humanos coletar informações táteis sobre os objetos provou ser um grande desafio até agora.



Pesquisadores da Universidade Beihang em Pequim desenvolveram recentemente uma nova técnica de detecção tátil que pode ser aplicada a dedos robóticos feitos de materiais macios. Esse mecanismo, introduzido, foi inspirado na propriocepção, o mecanismo biológico que permite aos mamíferos perceber ou ter consciência da posição e dos movimentos de seu corpo.
“A ideia por trás de nossa pesquisa recente é baseada na estrutura de propriocepção encontrada em humanos, que é o que determina a posição do nosso corpo e a carga em nossos tendões / articulações”, disse Chang Cheng, um dos pesquisadores que realizaram o estudo, ao TechXplore. “Pense em quando você coloca uma venda nos olhos e cobre as orelhas, ainda pode sentir a postura da sua mão, a posição do braço ou o peso de uma sacola de compras; essa capacidade é conhecida como propriocepção. Temos trabalhado em um projeto de pesquisa de próteses de mão e estamos procurando maneiras de resolver a falta de feedback sensorial nas mãos protéticas existentes. ”
No passado, os pesquisadores de robótica normalmente não correlacionavam a propriocepção com a sensação do tato. Na verdade, o mecanismo humano de propriocepção não permite respostas particularmente precisas, o que provavelmente é o motivo pelo qual os humanos não o usam para reconhecer a textura de objetos ou superfícies.
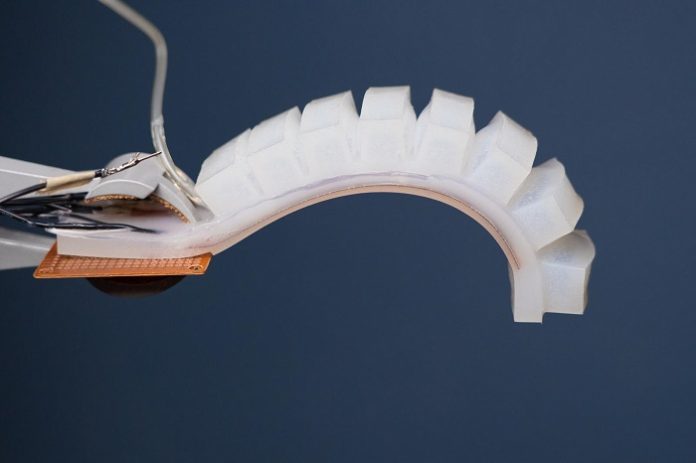
Como os sensores industriais são muito mais sensíveis que os proprioceptores humanos, aplicá-los a dedos robóticos pode ajudar os pesquisadores a obter feedback sensorial tátil mais preciso. O protótipo do sistema criado por Cheng e seus colegas é composto de um atuador linear, um tendão (ou cabo), uma tensão sensor e um dedo robótico macio apresentado em um de seus artigos anteriores.
“O tendão conecta o dedo ao atuador e o sensor de tensão é instalado no meio do tendão”, disse Cheng. “Quando o atuador é acionado, ele puxa o tendão, o que faz com que o dedo se dobre / endireite, e a tensão no tendão muda de acordo. Quando o dedo toca objetos diferentes, o sensor emite uma série de sinais de tensão que caracterizam os objetos tocados. ”
Essencialmente, a técnica idealizada pelos pesquisadores extrai características da leitura do sensor. Posteriormente, ele usa ferramentas de aprendizado de máquina para decifrar a textura e a rigidez da superfície ou objeto que o dedo robótico está tocando.
Cheng e seus colegas avaliaram sua técnica de detecção tátil executando uma série de testes usando o sistema de protótipo que eles criaram. Eles descobriram que sua técnica poderia decifrar a textura e rigidez com altos níveis de precisão (100% e 99.7%, respectivamente).
“A maioria das pesquisas existentes sobre a inervação de dedos biônicos propõe a instalação de sensores na superfície da ponta do dedo”, disse Cheng. “Embora esses estudos tenham produzido resultados promissores, eles exigem contatos exatos entre os sensores da ponta dos dedos e os objetos, o que muitas vezes não pode ser garantido na prática. A principal vantagem de nosso estudo é que a unidade de detecção está no tendão, portanto, o contato de qualquer lugar do dedo resultará em uma saída de sinal caracterizada, que pode ser utilizada para inferir informações táteis. ”
O novo método de detecção tátil introduzido por esta equipe de pesquisadores é baseado na incorporação de sensores em um tendão robótico, uma abordagem que nunca havia sido testada antes e que eles consideraram altamente promissora. No futuro, o sistema que eles desenvolveram pode ser usado para desenvolver robôs mais avançados e mãos protéticas que podem obter feedback tátil e proprioceptivo sem exigir um contato perfeito ou exato com uma superfície.
“Agora estamos explorando os recursos de detecção de deslizamento desse sistema”, disse Cheng. “Quando nós, humanos, manipulamos ou agarramos coisas, o deslizamento é quase inevitável, portanto, a detecção e o controle do deslizamento são cruciais para controles robustos e confiáveis. Portanto, acreditamos que a detecção de deslizamento seria um bom recurso a ser adicionado, e nossos experimentos preliminares mostraram resultados realmente promissores. ”
Além de desenvolver ainda mais seu sistema, os pesquisadores estão colaborando com um renomado laboratório de nanotecnologia no desenvolvimento de um sistema tátil de baixo custo sensor que pode detectar sinais de força / torque e pode ser colocado nas pontas dos dedos robóticos. Eles já criaram alguns protótipos desse dispositivo e agora estão avaliando seu desempenho.



