
Trong những năm gần đây, nhiều nhà chế tạo rô bốt trên toàn thế giới đã cố gắng phát triển các hệ thống rô bốt có thể tái tạo nhân tạo xúc giác của con người. Ngoài ra, họ đang cố gắng tạo ra các robot hình người và chân tay sinh học ngày càng thực tế và tiên tiến, sử dụng vật liệu mềm thay vì cấu trúc cứng nhắc.
Mặc dù có những ưu điểm liên quan đến kết cấu, những bàn tay robot làm bằng vật liệu mềm thường không thể thu thập được nhiều loại thông tin cảm quan. Trên thực tế, việc tái tạo các cơ chế sinh học phức tạp cho phép con người thu thập thông tin xúc giác về các đối tượng đã được chứng minh là một thách thức lớn cho đến nay.



Các nhà nghiên cứu tại Đại học Beihang ở Bắc Kinh gần đây đã phát triển một kỹ thuật cảm nhận xúc giác mới có thể áp dụng cho các ngón tay robot làm bằng vật liệu mềm. Cơ chế này, được giới thiệu, được lấy cảm hứng từ proprioception, cơ chế sinh học cho phép động vật có vú nhận thức hoặc nhận thức được vị trí và chuyển động của cơ thể chúng.
“Ý tưởng đằng sau nghiên cứu gần đây của chúng tôi dựa trên khung cơ bản được tìm thấy ở người, đó là yếu tố xác định vị trí cơ thể và tải trọng lên gân / khớp của chúng ta,” Chang Cheng, một trong những nhà nghiên cứu thực hiện nghiên cứu, nói với TechXplore. “Hãy nghĩ xem khi bạn bịt mắt và bịt tai lại, bạn vẫn có thể cảm nhận được tư thế bàn tay, vị trí cánh tay, hoặc độ nặng của túi hàng tạp hóa; khả năng này được gọi là proprioception. Chúng tôi đang thực hiện một dự án nghiên cứu về bàn tay giả và chúng tôi đang tìm cách để giải quyết tình trạng thiếu phản hồi cảm giác ở các bàn tay giả hiện có ”.
Trước đây, các nhà nghiên cứu người máy thường không tương quan giữa khả năng nhận thức với xúc giác. Trên thực tế, cơ chế nhận biết của con người không cho phép các phản ứng đặc biệt chính xác, đó có lẽ là lý do tại sao con người không sử dụng nó để nhận ra kết cấu của các vật thể hoặc bề mặt.
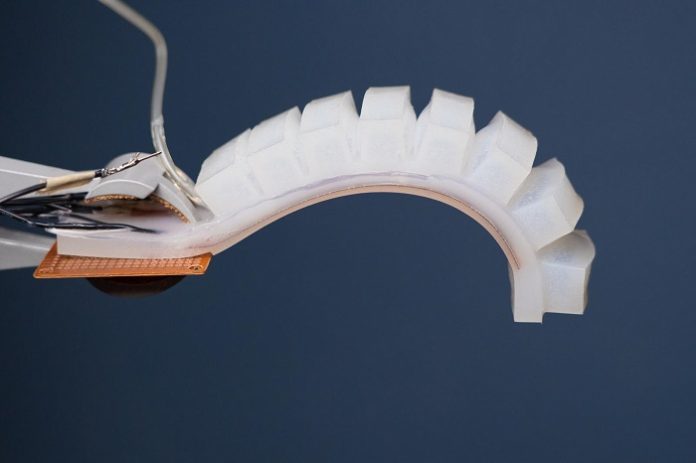
Tuy nhiên, vì các cảm biến công nghiệp nhạy hơn nhiều so với các cơ quan thụ cảm của con người, việc áp dụng chúng vào các ngón tay robot có thể giúp các nhà nghiên cứu thu thập phản hồi xúc giác chính xác hơn. Hệ thống nguyên mẫu do Cheng và các đồng nghiệp của ông tạo ra bao gồm một cơ cấu truyền động tuyến tính, một đường gân (hoặc dây cáp), một lực căng cảm biến và một ngón tay robot mềm được giới thiệu trong một trong những bài báo trước đây của họ.
Cheng cho biết: “Đường gân kết nối ngón tay với cơ cấu truyền động và cảm biến lực căng được lắp ở giữa đường gân. “Khi cơ cấu truyền động được truyền động, nó sẽ kéo gân, khiến ngón tay uốn cong / duỗi thẳng và lực căng trên gân cũng thay đổi theo. Khi ngón tay chạm vào các vật thể khác nhau, cảm biến sẽ xuất ra một loạt tín hiệu căng thẳng đặc trưng cho các vật thể được chạm vào ”.
Về cơ bản, kỹ thuật do các nhà nghiên cứu nghĩ ra sẽ trích xuất các tính năng từ việc đọc của cảm biến. Sau đó, nó sử dụng các công cụ học máy để giải mã kết cấu và độ cứng của bề mặt hoặc vật thể mà ngón tay robot đang chạm vào.
Cheng và các đồng nghiệp của ông đã đánh giá kỹ thuật cảm nhận xúc giác của họ bằng cách chạy một loạt các bài kiểm tra bằng cách sử dụng hệ thống nguyên mẫu mà họ đã tạo ra. Họ phát hiện ra rằng kỹ thuật của họ có thể giải mã kết cấu và độ cứng với độ chính xác cao (tương ứng là 100% và 99.7%).
Cheng cho biết: “Hầu hết các nghiên cứu hiện có về việc nội hóa ngón tay sinh học đều được đề xuất để lắp đặt các cảm biến trên bề mặt đầu ngón tay. “Trong khi những nghiên cứu này đã mang lại những kết quả đầy hứa hẹn, chúng đòi hỏi sự tiếp xúc chính xác giữa các cảm biến đầu ngón tay và các vật thể, điều này thường không thể được đảm bảo trong thực tế. Một ưu điểm chính trong nghiên cứu của chúng tôi là bộ phận cảm ứng nằm trên gân, do đó, việc tiếp xúc từ bất kỳ đâu trên ngón tay sẽ dẫn đến đầu ra tín hiệu đặc trưng, có thể được sử dụng để suy ra thông tin xúc giác. "
Phương pháp cảm nhận xúc giác mới được giới thiệu bởi nhóm các nhà nghiên cứu này dựa trên việc nhúng các cảm biến vào một đường gân của robot, một cách tiếp cận chưa từng được thử nghiệm trước đây và họ nhận thấy có nhiều hứa hẹn. Trong tương lai, hệ thống mà họ phát triển có thể được sử dụng để phát triển các robot và tay giả tiên tiến hơn có thể thu thập phản hồi xúc giác và nhạy cảm mà không yêu cầu tiếp xúc hoàn hảo hoặc chính xác với bề mặt.
Cheng cho biết: “Hiện chúng tôi đang khám phá khả năng phát hiện trượt của hệ thống này. “Khi con người chúng ta thao tác hoặc cầm nắm mọi thứ, việc trượt gần như không thể tránh khỏi, do đó, việc phát hiện và kiểm soát độ trượt là rất quan trọng để có được những điều khiển mạnh mẽ và đáng tin cậy. Vì vậy, chúng tôi tin rằng phát hiện trượt sẽ là một tính năng hay để thêm vào và các thử nghiệm sơ bộ của chúng tôi đã cho thấy kết quả thực sự hứa hẹn ”.
Ngoài việc phát triển hệ thống của họ hơn nữa, các nhà nghiên cứu đang hợp tác với một phòng thí nghiệm công nghệ nano nổi tiếng để phát triển một loại xúc giác chi phí thấp cảm biến có thể cảm nhận tín hiệu lực / mô-men xoắn và có thể được đặt trên đầu ngón tay của robot. Họ đã tạo ra một vài nguyên mẫu của thiết bị này và hiện đang đánh giá hiệu suất của nó.



