
Negli ultimi anni, numerosi robotisti in tutto il mondo hanno cercato di sviluppare sistemi robotici in grado di replicare artificialmente il senso del tatto umano. Inoltre, hanno cercato di creare arti bionici e robot umanoidi sempre più realistici e avanzati, utilizzando materiali morbidi anziché strutture rigide.
Nonostante i loro vantaggi legati alla consistenza, le mani robotiche realizzate con materiali morbidi spesso non sono in grado di raccogliere un'ampia gamma di informazioni sensoriali. In effetti, replicare i complessi meccanismi biologici che consentono agli esseri umani di raccogliere informazioni tattili sugli oggetti si è dimostrato finora molto impegnativo.



I ricercatori della Beihang University di Pechino hanno recentemente sviluppato una nuova tecnica di rilevamento tattile che potrebbe essere applicata alle dita robotiche realizzate con materiali morbidi. Questo meccanismo, introdotto, è stato ispirato dalla propriocezione, il meccanismo biologico che consente ai mammiferi di percepire o essere consapevoli della posizione e dei movimenti del proprio corpo.
"L'idea alla base della nostra recente ricerca si basa sulla struttura della propriocezione trovata negli esseri umani, che è ciò che determina la posizione del nostro corpo e il carico sui nostri tendini/articolazioni", ha detto a TechXplore Chang Cheng, uno dei ricercatori che ha condotto lo studio. “Pensa a quando metti una benda e ti copri le orecchie, puoi ancora sentire la postura della tua mano, la posizione del braccio o quanto è pesante una borsa della spesa; questa capacità è nota come propriocezione. Abbiamo lavorato a un progetto di ricerca sulla mano protesica e stiamo cercando modi per affrontare la mancanza di feedback sensoriale nelle mani protesiche esistenti”.
In passato, i ricercatori di robotica in genere non correlavano la propriocezione con il senso del tatto. In effetti, il meccanismo umano della propriocezione non consente risposte particolarmente precise, motivo per cui probabilmente gli umani non lo utilizzano per riconoscere la trama di oggetti o superfici.
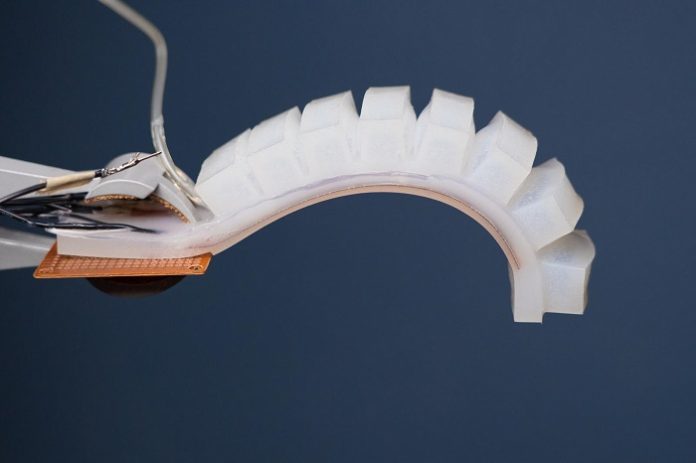
Poiché i sensori industriali sono molto più sensibili dei propriocettori umani, tuttavia, applicarli alle dita robotiche potrebbe aiutare i ricercatori a raccogliere feedback sensoriali tattili più precisi. Il sistema prototipo creato da Cheng e dai suoi colleghi è composto da un attuatore lineare, un tendine (o cavo), un ceppo sensore e un morbido dito robotico introdotto in uno dei loro articoli precedenti.
"Il tendine collega il dito all'attuatore e il sensore di deformazione è installato nel mezzo del tendine", ha detto Cheng. “Quando l'attuatore viene azionato, tira il tendine, il che fa piegare/raddrizzare il dito e la tensione sul tendine cambia di conseguenza. Quando il dito tocca oggetti diversi, il sensore emette una serie di segnali di deformazione che caratterizzano gli oggetti toccati.
In sostanza, la tecnica ideata dai ricercatori estrae caratteristiche dalla lettura del sensore. Successivamente, utilizza strumenti di apprendimento automatico per decifrare la trama e la rigidità della superficie o dell'oggetto che il dito robotico sta toccando.
Cheng e i suoi colleghi hanno valutato la loro tecnica di rilevamento tattile eseguendo una serie di test utilizzando il sistema prototipo che hanno creato. Hanno scoperto che la loro tecnica poteva decifrare la consistenza e la rigidità con alti livelli di precisione (rispettivamente 100% e 99.7%).
"La maggior parte delle ricerche esistenti sull'innervazione delle dita bioniche ha proposto l'installazione di sensori sulla superficie della punta delle dita", ha affermato Cheng. “Anche se questi studi hanno prodotto risultati promettenti, richiedono contatti esatti tra i sensori della punta delle dita e gli oggetti, che spesso non possono essere garantiti nella pratica. Un vantaggio chiave del nostro studio è che l'unità di rilevamento si trova sul tendine, quindi il contatto da qualsiasi punto del dito si tradurrà in un'uscita di segnale caratterizzata, che può essere utilizzata per dedurre informazioni tattili.
Il nuovo metodo di rilevamento tattile introdotto da questo team di ricercatori si basa sull'incorporamento di sensori su un tendine robotico, un approccio che non era mai stato testato prima e che si è rivelato molto promettente. In futuro, il sistema che hanno sviluppato potrebbe essere utilizzato per sviluppare robot e mani protesiche più avanzati in grado di raccogliere feedback tattili e propriocettivi senza richiedere un contatto perfetto o esatto con una superficie.
"Stiamo esplorando le capacità di rilevamento dello slittamento di questo sistema", ha affermato Cheng. “Quando noi esseri umani manipoliamo o afferriamo le cose, lo slittamento è quasi inevitabile, quindi il rilevamento e il controllo dello slittamento è fondamentale per controlli robusti e affidabili. Quindi, riteniamo che il rilevamento dello slittamento sarebbe una bella funzionalità da aggiungere e i nostri esperimenti preliminari hanno mostrato risultati davvero promettenti".
Oltre a sviluppare ulteriormente il loro sistema, i ricercatori stanno collaborando con un rinomato laboratorio di nanotecnologie allo sviluppo di un dispositivo tattile a basso costo sensore in grado di rilevare segnali di forza/coppia e può essere posizionato sulla punta delle dita robotiche. Hanno già creato alcuni prototipi di questo dispositivo e ora stanno valutando le sue prestazioni.



