
Dalam beberapa tahun kebelakangan ini, banyak robotik di seluruh dunia telah berusaha untuk mengembangkan sistem robotik yang secara tiruan dapat meniru sentuhan manusia. Di samping itu, mereka telah berusaha untuk membuat anggota badan bionik dan robot humanoid yang semakin realistik dan maju, menggunakan bahan lembut dan bukannya struktur kaku.
Walaupun terdapat kelebihan yang berkaitan dengan tekstur, tangan robot yang terbuat dari bahan lembut sering kali tidak dapat mengumpulkan pelbagai maklumat deria. Sebenarnya, meniru mekanisme biologi kompleks yang membolehkan manusia mengumpulkan maklumat taktil mengenai objek telah terbukti sangat mencabar setakat ini.



Penyelidik di Universiti Beihang di Beijing baru-baru ini mengembangkan teknik penginderaan taktil baru yang dapat digunakan pada jari robot yang terbuat dari bahan lembut. Mekanisme ini, diperkenalkan, diilhami oleh proprioception, mekanisme biologi yang memungkinkan mamalia untuk melihat atau mengetahui kedudukan dan pergerakan tubuh mereka.
"Idea di sebalik penyelidikan baru-baru ini didasarkan pada kerangka proprioception yang terdapat pada manusia, yang menentukan kedudukan tubuh kita dan beban pada tendon / sendi kita," kata Chang Cheng, salah seorang penyelidik yang melakukan kajian itu, kepada TechXplore. “Fikirkan ketika anda memasang penutup mata dan menutup telinga, anda masih dapat merasakan postur tangan, posisi lengan, atau seberapa berat beg runcit; kemampuan ini dikenali sebagai proprioception. Kami telah mengusahakan projek penyelidikan tangan prostetik dan kami sedang mencari cara untuk mengatasi kekurangan maklum balas deria pada tangan prostetik yang ada. "
Pada masa lalu, penyelidik robotik biasanya tidak menghubungkan proprioception dengan rasa sentuhan. Sebenarnya, mekanisme proprioception manusia tidak membenarkan tindak balas yang tepat, yang mungkin mengapa manusia tidak menggunakannya untuk mengenali tekstur objek atau permukaan.
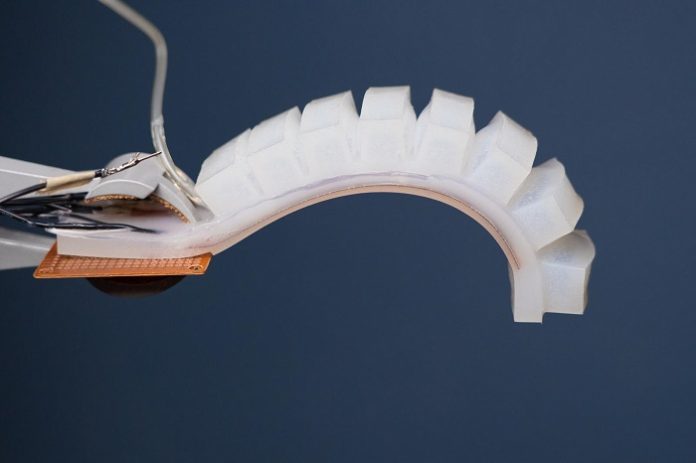
Oleh kerana sensor industri jauh lebih sensitif daripada proprioceptor manusia, bagaimanapun, menggunakannya pada jari robot dapat membantu penyelidik mengumpulkan maklum balas deria sentuhan yang lebih tepat. Sistem prototaip yang dibuat oleh Cheng dan rakannya terdiri daripada penggerak linear, tendon (atau kabel), regangan sensor dan jari robot lembut yang diperkenalkan di salah satu makalah sebelumnya.
"Tendon menghubungkan jari ke penggerak dan sensor regangan dipasang di tengah tendon," kata Cheng. "Ketika penggerak digerakkan, ia menarik tendon, yang menyebabkan jari membengkok / meluruskan, dan regangan pada tendon berubah sesuai. Apabila jari menyentuh objek yang berlainan, sensor akan mengeluarkan rangkaian isyarat regangan yang menjadi ciri objek yang disentuh. "
Pada dasarnya, teknik yang dirancang oleh penyelidik mengekstrak ciri-ciri dari pembacaan sensor. Selepas itu, ia menggunakan alat pembelajaran mesin untuk menguraikan tekstur dan kekakuan permukaan atau objek yang disentuh oleh jari robot.
Cheng dan rakan-rakannya menilai teknik penginderaan taktil mereka dengan menjalankan serangkaian ujian menggunakan sistem prototaip yang mereka buat. Mereka mendapati bahawa teknik mereka dapat menguraikan tekstur dan kekakuan dengan tahap ketepatan yang tinggi (masing-masing 100% dan 99.7%).
"Sebilangan besar penyelidikan yang ada mengenai jari-jari bionik yang menginspirasi dicadangkan untuk pemasangan sensor di permukaan hujung jari," kata Cheng. "Walaupun penelitian ini memberikan hasil yang menjanjikan, mereka memerlukan kontak yang tepat antara sensor ujung jari dan objek, yang seringkali tidak dapat dipastikan dalam praktiknya. Kelebihan utama kajian kami adalah unit penginderaan berada pada tendon, sehingga kontak dari mana saja di jari akan menghasilkan output isyarat yang dicirikan, yang dapat digunakan untuk menyimpulkan maklumat taktil. "
Kaedah penginderaan taktil baru yang diperkenalkan oleh pasukan penyelidik ini didasarkan pada penyisipan sensor pada tendon robotik, pendekatan yang belum pernah diuji sebelumnya dan didapati mereka sangat menjanjikan. Di masa depan, sistem yang mereka kembangkan dapat digunakan untuk mengembangkan robot dan tangan prostetik yang lebih maju yang dapat mengumpulkan maklum balas taktil dan proprioceptif tanpa memerlukan kontak yang sempurna atau tepat dengan permukaan.
"Kami kini meneroka keupayaan pengesanan slippage sistem ini," kata Cheng. “Ketika kita manusia memanipulasi atau memahami sesuatu, slippage hampir tidak dapat dihindari, oleh itu pengesanan dan kawalan slippage sangat penting untuk kawalan yang kuat dan dapat dipercayai. Oleh itu, kami percaya pengesanan slippage akan menjadi ciri yang bagus untuk ditambahkan, dan eksperimen awal kami menunjukkan hasil yang sangat menjanjikan. "
Sebagai tambahan untuk mengembangkan sistem mereka lebih jauh, para penyelidik bekerjasama dengan makmal nanoteknologi terkenal mengenai pengembangan taktik kos rendah sensor yang dapat merasakan isyarat daya / tork dan boleh diletakkan di hujung jari robot. Mereka telah membuat beberapa prototaip peranti ini dan kini sedang menilai prestasinya.



