
In de afgelopen jaren hebben talloze robotici over de hele wereld geprobeerd robotsystemen te ontwikkelen die de menselijke tastzin kunstmatig kunnen nabootsen. Bovendien hebben ze geprobeerd om steeds realistischere en geavanceerdere bionische ledematen en humanoïde robots te maken, met behulp van zachte materialen in plaats van stijve structuren.
Ondanks hun textuurgerelateerde voordelen, zijn robothanden gemaakt van zachte materialen vaak niet in staat om een breed scala aan sensorische informatie te verzamelen. Het repliceren van de complexe biologische mechanismen waarmee mensen tactiele informatie over objecten kunnen verzamelen, is tot nu toe een grote uitdaging gebleken.



Onderzoekers van de Beihang University in Peking hebben onlangs een nieuwe tactiele detectietechniek ontwikkeld die kan worden toegepast op robotvingers van zachte materialen. Dit mechanisme, geïntroduceerd, is geïnspireerd op proprioceptie, het biologische mechanisme waarmee zoogdieren de positie en bewegingen van hun lichaam kunnen waarnemen of zich ervan bewust zijn.
"Het idee achter ons recente onderzoek is gebaseerd op het proprioceptieraamwerk dat bij mensen wordt gevonden, wat onze lichaamspositie en belasting van onze pezen/gewrichten bepaalt", vertelde Chang Cheng, een van de onderzoekers die het onderzoek uitvoerde, aan TechXplore. “Denk eraan dat wanneer je een blinddoek omdoet en je oren bedekt, je nog steeds je handhouding, armpositie of hoe zwaar een boodschappentas is, kunt voelen; dit vermogen staat bekend als proprioceptie. We hebben gewerkt aan een onderzoeksproject voor handprothesen en we zijn op zoek naar manieren om het gebrek aan sensorische feedback in bestaande handprothesen aan te pakken.”
In het verleden correleerden robotica-onderzoekers meestal niet proprioceptie met de tastzin. In feite laat het menselijke mechanisme van proprioceptie geen bijzonder precieze reacties toe, wat waarschijnlijk de reden is waarom mensen het niet gebruiken om de textuur van objecten of oppervlakken te herkennen.
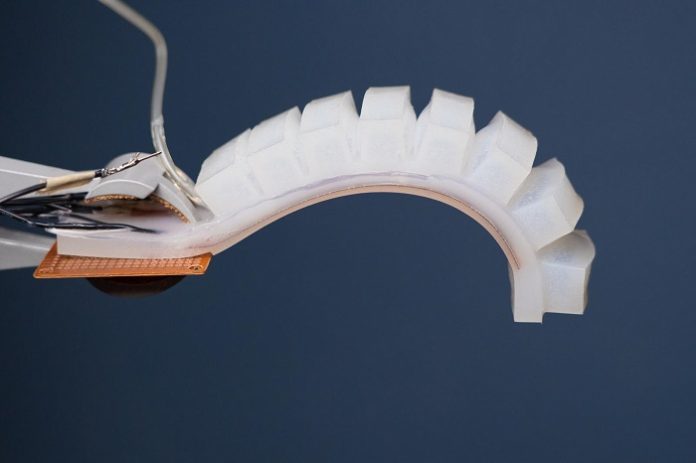
Omdat industriële sensoren veel gevoeliger zijn dan menselijke proprioceptoren, zou het toepassen ervan op robotvingers onderzoekers kunnen helpen om preciezere tactiele sensorische feedback te verzamelen. Het prototypesysteem dat door Cheng en zijn collega's is gemaakt, bestaat uit een lineaire actuator, een pees (of kabel), een spanning sensor en een zachte robotvinger geïntroduceerd in een van hun eerdere artikelen.
"De pees verbindt de vinger met de actuator en de spanningssensor wordt in het midden van de pees geïnstalleerd", zei Cheng. “Als de actuator wordt aangedreven, trekt hij aan de pees, waardoor de vinger buigt/strekt, en de spanning op de pees verandert dienovereenkomstig. Wanneer de vinger verschillende objecten aanraakt, geeft de sensor reeksen spanningssignalen af die de aangeraakte objecten karakteriseren.
In wezen haalt de door de onderzoekers bedachte techniek kenmerken uit de meetwaarde van de sensor. Vervolgens gebruikt het machine learning-tools om de textuur en stijfheid te ontcijferen van het oppervlak of object dat de robotvinger aanraakt.
Cheng en zijn collega's evalueerden hun tactiele detectietechniek door een reeks tests uit te voeren met behulp van het prototypesysteem dat ze hadden gemaakt. Ze ontdekten dat hun techniek de textuur en stijfheid met hoge nauwkeurigheid kon ontcijferen (respectievelijk 100% en 99.7%).
"Het meeste bestaande onderzoek naar het innerveren van bionische vingers stelde voor om sensoren op het vingertopoppervlak te installeren," zei Cheng. “Hoewel deze studies veelbelovende resultaten hebben opgeleverd, vereisen ze exacte contacten tussen de vingertopsensoren en de objecten, wat in de praktijk vaak niet kan worden gegarandeerd. Een belangrijk voordeel van onze studie is dat de detectie-eenheid zich op de pees bevindt, dus contact vanaf elke plek op de vinger zal resulteren in een gekarakteriseerde signaaluitvoer, die kan worden gebruikt om tactiele informatie af te leiden."
De nieuwe tactiele detectiemethode die door dit team van onderzoekers is geïntroduceerd, is gebaseerd op het inbedden van sensoren op een robotpees, een aanpak die nog nooit eerder was getest en die ze veelbelovend vonden. In de toekomst zou het door hen ontwikkelde systeem kunnen worden gebruikt om geavanceerdere robots en prothetische handen te ontwikkelen die tactiele en proprioceptieve feedback kunnen verzamelen zonder dat een perfect of exact contact met een oppervlak nodig is.
"We onderzoeken nu de slipdetectiemogelijkheden van dit systeem", zei Cheng. "Als wij mensen dingen manipuleren of grijpen, is slippen bijna onvermijdelijk, daarom is detectie en controle van slippen cruciaal voor robuuste en betrouwbare controles. Dus we denken dat slipdetectie een leuke functie zou zijn om toe te voegen, en onze voorlopige experimenten lieten echt veelbelovende resultaten zien.”
Naast het doorontwikkelen van hun systeem werken de onderzoekers samen met een gerenommeerd nanotechnologielab aan de ontwikkeling van een goedkope tactiele sensor die kracht-/koppelsignalen kan detecteren en op robotvingers kan worden geplaatst. Ze hebben al een paar prototypes van dit apparaat gemaakt en zijn nu de prestaties aan het evalueren.



