
בשנים האחרונות ניסו רובוטיקאים רבים ברחבי העולם לפתח מערכות רובוטיות שיכולות לשכפל באופן מלאכותי את חוש המגע האנושי. בנוסף, הם ניסו ליצור איברים ביוניים יותר ויותר מציאותיים ומתקדמים ורובוטים אנושיים, תוך שימוש בחומרים רכים במקום במבנים קשיחים.
למרות יתרונותיהם הקשורים למרקם, ידיים רובוטיות העשויות מחומרים רכים לרוב אינן מסוגלות לאסוף מגוון רחב של מידע חושי. למעשה, שכפול המנגנונים הביולוגיים המורכבים המאפשרים לבני אדם לאסוף מידע מישוש על אובייקטים התגלה כמאתגר ביותר עד כה.



חוקרים מאוניברסיטת ביהאנג בבייג'ינג פיתחו לאחרונה טכניקת חישה מישוש חדשה שניתן ליישם על אצבעות רובוטיות מחומרים רכים. מנגנון זה, שהוצג, היה בהשראת הפרופריוספציה, המנגנון הביולוגי המאפשר ליונקים לתפוס או להיות מודעים למיקום גופם ותנועותיהם.
"הרעיון מאחורי המחקר האחרון שלנו מבוסס על מסגרת הפרופריוספציה שנמצאה בבני אדם, וזה מה שקובע את מיקום הגוף והעומס שלנו על הגידים/מפרקים", אמר צ'אנג צ'נג, אחד החוקרים שביצע את המחקר, ל- TechXplore. "תחשוב על כשאתה עוטה כיסוי עיניים ומכסה את האוזניים, אתה עדיין יכול להרגיש את יציבת היד שלך, תנוחת הזרוע שלך, או עד כמה שק המכולת כבד; יכולת זו ידועה בשם פרופריוספציה. עבדנו על פרויקט מחקר תותב ואנו מחפשים דרכים להתמודד עם היעדר משוב חושי בידיים תותבות קיימות ”.
בעבר, חוקרי רובוטיקה לא התאימו בדרך כלל את הפרופריוספציה לחוש המגע. למעשה, המנגנון האנושי של פרופריוספציה אינו מאפשר תגובות מדויקות במיוחד, וזו כנראה הסיבה שבני אדם אינם משתמשים בו כדי לזהות את מרקם החפצים או המשטחים.
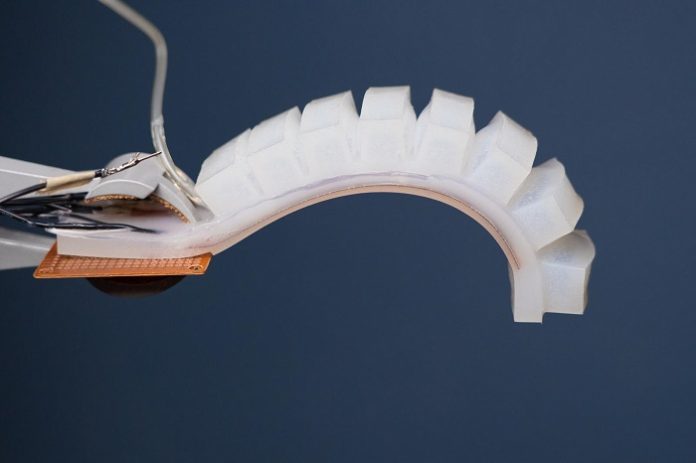
מכיוון שחיישנים תעשייתיים רגישים הרבה יותר מאשר פרופרוספטורים אנושיים, עם זאת, החלתם על אצבעות רובוטיות יכולה לסייע לחוקרים לאסוף פידבק חושי מדויק יותר. מערכת האב טיפוס שיצרו צ'נג ועמיתיו מורכבת ממפעיל לינארי, גיד (או כבל), זן חיישן ואצבע רובוטית רכה שהוצגה באחד העיתונים הקודמים שלהם.
"הגיד מחבר את האצבע למפעיל וחיישן המתח מותקן באמצע הגיד", אמר צ'נג. "כאשר המפעיל מונע, הוא מושך את הגיד, מה שגורם לאצבע להתכופף/להתיישר, והעומס על הגיד משתנה בהתאם. כאשר האצבע נוגעת באובייקטים שונים, החיישן היה מוציא סדרות של אותות מתח המאפיינים את האובייקטים שנוגעו בהם. "
בעיקרו של דבר, הטכניקה שתכננו החוקרים שואבת תכונות מקריאת החיישן. לאחר מכן, היא משתמשת בכלים של למידת מכונה כדי לפענח את המרקם והנוקשות של המשטח או האובייקט שהאצבע הרובוטית נוגעת בו.
צ'נג ועמיתיו העריכו את טכניקת החישה המישוש שלהם על ידי הפעלת סדרת בדיקות באמצעות מערכת האב טיפוס שיצרו. הם גילו שהטכניקה שלהם יכולה לפענח את המרקם והנוקשות ברמות דיוק גבוהות (100% ו -99.7%, בהתאמה).
"רוב המחקרים הקיימים בנושא עצבניות אצבעות ביוניות הוצעו להתקנת חיישנים על פני קצה האצבע", אמר צ'נג. "למרות שמחקרים אלה הניבו תוצאות מבטיחות, הם דורשים מגעים מדויקים בין חיישני קצות האצבעות לאובייקטים, שלעיתים לא ניתן להבטיח אותם בפועל. יתרון מרכזי במחקר שלנו הוא שיחידת החישה נמצאת על הגיד, ולכן מגע מכל מקום באצבע יביא לפלט אות מאופיין, אשר עשוי לשמש להסקת מידע מישוש. "
שיטת החישה המישוש החדשה שהציג צוות חוקרים זה מבוססת על הטמעת חיישנים על גיד רובוטי, גישה שמעולם לא נבדקה ושהם נמצאו כמבטיחים ביותר. בעתיד, המערכת שפיתחו תוכל לשמש לפיתוח רובוטים מתקדמים יותר וידיים תותבות שיכולות לאסוף משוב מישוש ופרופריוספטיבי ללא צורך במגע מושלם או מדויק עם משטח.
"אנו בוחנים כעת את יכולות זיהוי החלקה של מערכת זו", אמר צ'נג. "כשאנחנו בני האדם מתפעלים או תופסים דברים, החלקה כמעט בלתי נמנעת, ולכן גילוי ושליטה על החלקה הוא קריטי לבקרות חזקות ואמינות. לכן, אנו מאמינים שזיהוי החלקה יהיה תכונה נחמדה להוסיף, והניסויים המקדימים שלנו הראו תוצאות מבטיחות באמת ".
בנוסף לפיתוח המערכת שלהם עוד יותר, החוקרים משתפים פעולה עם מעבדת ננו-טכנולוגיה ידועה על פיתוח מישוש בעלות נמוכה חיישן שיכולים לחוש אותות כוח/מומנט ויכולים להיות מונחים על קצות האצבעות הרובוטיות. הם כבר יצרו כמה אבות טיפוס של מכשיר זה וכעת מעריכים את ביצועיו.



