
В последние годы многочисленные робототехники по всему миру пытались разработать роботизированные системы, которые могут искусственно воспроизводить человеческое осязание. Кроме того, они пытались создать все более реалистичные и продвинутые бионические конечности и гуманоидных роботов, используя мягкие материалы вместо жестких структур.
Несмотря на свои преимущества, связанные с текстурой, руки роботов из мягких материалов часто неспособны собирать широкий спектр сенсорной информации. Фактически, воспроизведение сложных биологических механизмов, которые позволяют людям собирать тактильную информацию об объектах, до сих пор оказалось очень сложной задачей.



Исследователи из Университета Бейхан в Пекине недавно разработали новую технику тактильного ощущения, которую можно применить к роботизированным пальцам, сделанным из мягких материалов. Этот представленный механизм был вдохновлен проприоцепцией, биологическим механизмом, который позволяет млекопитающим воспринимать или осознавать положение и движения своего тела.
«Идея нашего недавнего исследования основана на структуре проприоцепции, обнаруженной у людей, которая определяет положение нашего тела и нагрузку на наши сухожилия / суставы», - сказал TechXplore один из исследователей, проводивших исследование. «Подумайте о том, когда вы надеваете повязку на глаза и закрываете уши, вы все равно можете чувствовать положение своей руки, положение рук или насколько тяжелый пакет с продуктами; эта способность известна как проприоцепция. Мы работаем над исследовательским проектом по протезам руки и ищем способы решить проблему отсутствия сенсорной обратной связи в существующих протезах руки ».
В прошлом исследователи робототехники обычно не связывали проприоцепцию с осязанием. Фактически, человеческий механизм проприоцепции не позволяет получить особенно точные ответы, вероятно, поэтому люди не используют его для распознавания текстуры предметов или поверхностей.
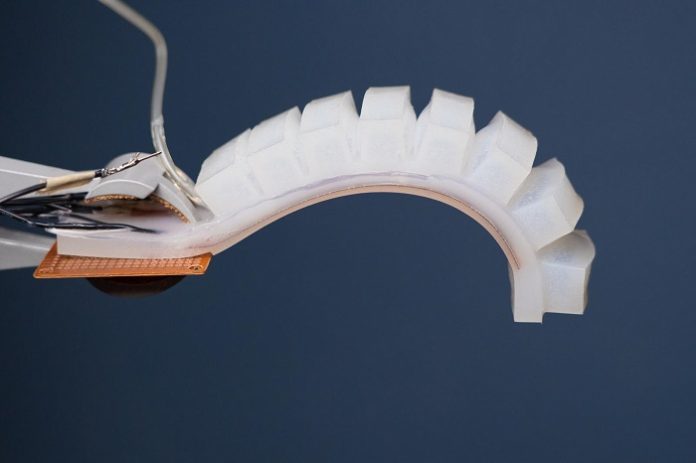
Однако, поскольку промышленные сенсоры намного более чувствительны, чем человеческие проприорецепторы, их применение к роботизированным пальцам может помочь исследователям получить более точную тактильную сенсорную обратную связь. Система-прототип, созданная Ченгом и его коллегами, состоит из линейного привода, сухожилия (или кабеля), натяжения датчик и мягкий роботизированный палец, представленный в одной из их предыдущих статей.
«Сухожилие соединяет палец с приводом, а датчик деформации устанавливается в середине сухожилия», - сказал Ченг. «Когда привод приводится в действие, он тянет за сухожилие, что заставляет палец сгибаться / выпрямляться, и соответственно изменяется нагрузка на сухожилие. Когда палец касается различных объектов, датчик будет выдавать серию сигналов деформации, которые характеризуют объекты, которых коснулись ».
По сути, метод, разработанный исследователями, извлекает особенности из показаний датчика. Впоследствии он использует инструменты машинного обучения, чтобы расшифровать текстуру и жесткость поверхности или объекта, к которому прикасается робот-палец.
Ченг и его коллеги оценили свою технику тактильного восприятия, выполнив серию тестов с использованием созданного ими прототипа системы. Они обнаружили, что их техника может расшифровать текстуру и жесткость с высоким уровнем точности (100% и 99.7% соответственно).
«Большинство существующих исследований об иннервации бионических пальцев предполагают установку датчиков на поверхности кончиков пальцев», - сказал Ченг. «Хотя эти исследования дали многообещающие результаты, они требуют точного контакта между датчиками на кончиках пальцев и объектами, что часто не может быть обеспечено на практике. Ключевым преимуществом нашего исследования является то, что сенсорный блок находится на сухожилии, поэтому контакт из любого места на пальце приведет к выходному сигналу, который может быть использован для вывода тактильной информации ».
Новый метод тактильного ощущения, представленный этой группой исследователей, основан на встраивании датчиков в сухожилие робота, подходе, который ранее никогда не тестировался и который они сочли очень многообещающим. В будущем разработанную ими систему можно будет использовать для разработки более совершенных роботов и протезов рук, которые смогут собирать тактильную и проприоцептивную обратную связь, не требуя идеального или точного контакта с поверхностью.
«Сейчас мы изучаем возможности этой системы по обнаружению проскальзывания», - сказал Ченг. «Когда мы, люди, манипулируем или захватываем предметы, проскальзывание почти неизбежно, поэтому обнаружение и контроль проскальзывания имеют решающее значение для надежного и надежного контроля. Итак, мы считаем, что обнаружение проскальзывания было бы неплохим дополнением, и наши предварительные эксперименты показали действительно многообещающие результаты ».
Помимо дальнейшей разработки своей системы, исследователи сотрудничают с известной нанотехнологической лабораторией над разработкой недорогого тактильного устройства. датчик которые могут воспринимать сигналы силы / крутящего момента и могут быть помещены на кончики пальцев робота. Они уже создали несколько прототипов этого устройства и сейчас оценивают его производительность.



