
En los últimos años, numerosos especialistas en robótica de todo el mundo han intentado desarrollar sistemas robóticos que puedan replicar artificialmente el sentido del tacto humano. Además, han estado tratando de crear extremidades biónicas y robots humanoides cada vez más realistas y avanzados, utilizando materiales blandos en lugar de estructuras rígidas.
A pesar de sus ventajas relacionadas con la textura, las manos robóticas hechas de materiales blandos a menudo no pueden recopilar una amplia gama de información sensorial. De hecho, replicar los complejos mecanismos biológicos que permiten a los humanos recopilar información táctil sobre objetos ha demostrado ser un gran desafío hasta ahora.



Investigadores de la Universidad de Beihang en Beijing han desarrollado recientemente una nueva técnica de detección táctil que podría aplicarse a dedos robóticos hechos de materiales blandos. Este mecanismo, introducido, se inspiró en la propiocepción, el mecanismo biológico que permite a los mamíferos percibir o ser conscientes de la posición y los movimientos de su cuerpo.
“La idea detrás de nuestra investigación reciente se basa en el marco de propiocepción que se encuentra en los humanos, que es lo que determina la posición de nuestro cuerpo y la carga en nuestros tendones / articulaciones”, dijo a TechXplore Chang Cheng, uno de los investigadores que llevó a cabo el estudio. “Piense que cuando se pone una venda en los ojos y se tapa los oídos, todavía puede sentir la postura de sus manos, la posición de sus brazos o lo pesada que es una bolsa de la compra; esta capacidad se conoce como propiocepción. Hemos estado trabajando en un proyecto de investigación de manos protésicas y estamos buscando formas de abordar la falta de retroalimentación sensorial en las manos protésicas existentes ”.
En el pasado, los investigadores en robótica normalmente no correlacionaban la propiocepción con el sentido del tacto. De hecho, el mecanismo humano de la propiocepción no permite respuestas particularmente precisas, razón por la cual probablemente los humanos no lo utilicen para reconocer la textura de objetos o superficies.
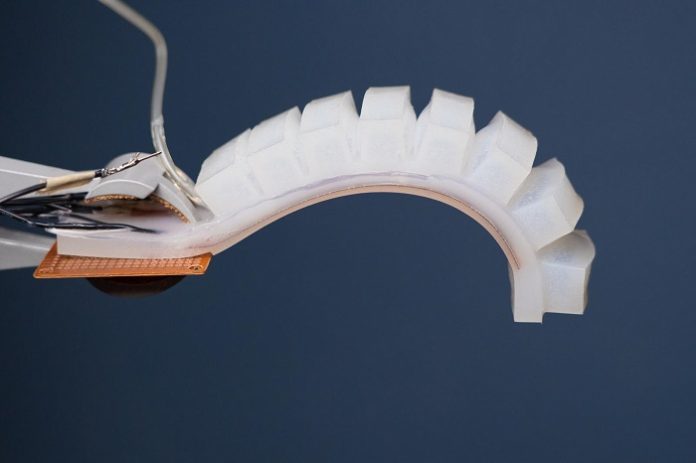
Como los sensores industriales son mucho más sensibles que los propioceptores humanos, sin embargo, aplicarlos a los dedos robóticos podría ayudar a los investigadores a recopilar información sensorial táctil más precisa. El sistema prototipo creado por Cheng y sus colegas se compone de un actuador lineal, un tendón (o cable), una tensión sensor y un dedo robótico suave introducido en uno de sus artículos anteriores.
"El tendón conecta el dedo al actuador y el sensor de tensión se instala en el medio del tendón", dijo Cheng. “Cuando se acciona el actuador, tira del tendón, lo que hace que el dedo se doble / enderece, y la tensión en el tendón cambia en consecuencia. Cuando el dedo toca diferentes objetos, el sensor genera una serie de señales de tensión que caracterizan los objetos tocados ".
Esencialmente, la técnica ideada por los investigadores extrae características de la lectura del sensor. Posteriormente, utiliza herramientas de aprendizaje automático para descifrar la textura y rigidez de la superficie u objeto que está tocando el dedo robótico.
Cheng y sus colegas evaluaron su técnica de detección táctil ejecutando una serie de pruebas utilizando el sistema prototipo que crearon. Descubrieron que su técnica podía descifrar la textura y la rigidez con altos niveles de precisión (100% y 99.7%, respectivamente).
“La mayoría de las investigaciones existentes sobre la inervación de los dedos biónicos propusieron la instalación de sensores en la superficie de la yema del dedo”, dijo Cheng. “Si bien estos estudios han arrojado resultados prometedores, requieren contactos exactos entre los sensores de la punta de los dedos y los objetos, lo que a menudo no se puede garantizar en la práctica. Una ventaja clave de nuestro estudio es que la unidad sensora está en el tendón, por lo que el contacto desde cualquier parte del dedo dará como resultado una salida de señal caracterizada, que puede utilizarse para inferir información táctil ”.
El nuevo método de detección táctil presentado por este equipo de investigadores se basa en la integración de sensores en un tendón robótico, un enfoque que nunca antes se había probado y que les pareció muy prometedor. En el futuro, el sistema que desarrollaron podría usarse para desarrollar robots más avanzados y manos protésicas que puedan recopilar retroalimentación táctil y propioceptiva sin requerir un contacto perfecto o exacto con una superficie.
"Ahora estamos explorando las capacidades de detección de deslizamientos de este sistema", dijo Cheng. “Cuando los seres humanos manipulamos o agarramos cosas, el deslizamiento es casi inevitable, por lo tanto, la detección y el control del deslizamiento es crucial para controles robustos y confiables. Por lo tanto, creemos que la detección de deslizamientos sería una buena característica para agregar, y nuestros experimentos preliminares mostraron resultados realmente prometedores ".
Además de desarrollar aún más su sistema, los investigadores están colaborando con un laboratorio de nanotecnología de renombre en el desarrollo de una tecnología táctil de bajo costo. sensor que puede detectar señales de fuerza / torsión y podría colocarse en la punta de los dedos robóticos. Ya crearon algunos prototipos de este dispositivo y ahora están evaluando su rendimiento.



