
近年、世界中の多くのロボット工学者が、人間の触覚を人工的に再現できるロボットシステムの開発を試みています。 さらに、彼らは、硬い構造の代わりに柔らかい材料を使用して、ますます現実的で高度な生体工学の手足とヒューマノイドロボットを作成しようとしています。
テクスチャに関連する利点にもかかわらず、柔らかい素材で作られたロボットの手は、多くの場合、広範囲の感覚情報を収集することができません。 実際、人間が物体に関する触覚情報を収集できるようにする複雑な生物学的メカニズムを複製することは、これまでのところ非常に困難であることが証明されています。



北京の北漢大学の研究者たちは最近、柔らかい素材で作られたロボットの指に適用できる新しい触覚センシング技術を開発しました。 導入されたこのメカニズムは、哺乳類が自分の体の位置と動きを認識または認識できるようにする生物学的メカニズムである固有受容に触発されました。
「私たちの最近の研究の背後にある考え方は、人間に見られる固有受容感覚の枠組みに基づいています。これは、私たちの体の位置と腱/関節への負荷を決定するものです」と、研究を行った研究者のXNUMX人であるChangChengはTechXploreに語った。 「目隠しをして耳を覆うとき、手の姿勢、腕の位置、または買い物袋の重さを感じることができます。 この能力は固有受容として知られています。 私たちは義手研究プロジェクトに取り組んでおり、既存の義手における感覚フィードバックの欠如に対処する方法を探しています。」
過去には、ロボット工学の研究者は通常、固有受容と触覚を相関させていませんでした。 実際、固有受容の人間のメカニズムは、特に正確な応答を可能にしません。それがおそらく、人間が物体や表面のテクスチャを認識するためにそれを使用しない理由です。
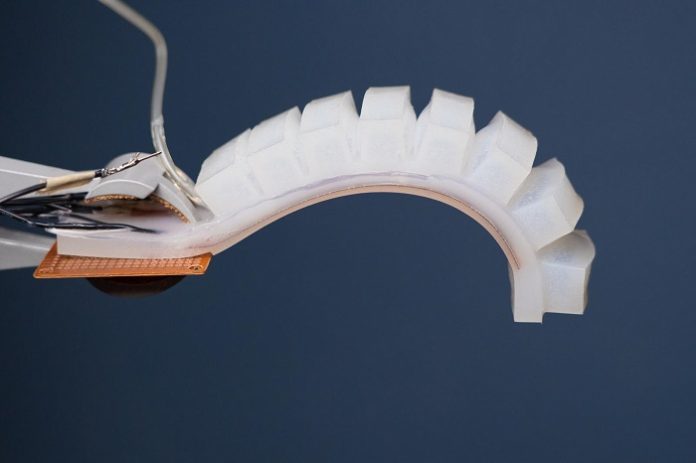
ただし、産業用センサーは人間の固有受容器よりもはるかに感度が高いため、ロボットの指に適用すると、研究者はより正確な触覚感覚フィードバックを収集するのに役立ちます。 チェンと彼の同僚によって作成されたプロトタイプシステムは、リニアアクチュエータ、テンドン(またはケーブル)、ひずみで構成されています センサー 以前の論文のXNUMXつで紹介されたソフトロボットの指。
「腱は指をアクチュエーターに接続し、ひずみセンサーは腱の中央に取り付けられています」とチェン氏は述べています。 「アクチュエーターを駆動すると、腱が引っ張られ、指が曲がったり真っ直ぐになったりします。それに応じて腱のひずみが変化します。 指がさまざまな物体に触れると、センサーは触れられた物体を特徴付ける一連のひずみ信号を出力します。」
基本的に、研究者によって考案された手法は、センサーの読み取り値から特徴を抽出します。 続いて、機械学習ツールを使用して、ロボットの指が触れている表面またはオブジェクトのテクスチャと剛性を解読します。
Chengと彼の同僚は、作成したプロトタイプシステムを使用して一連のテストを実行することにより、触覚センシング技術を評価しました。 彼らは、彼らの技術が高レベルの精度(それぞれ100%と99.7%)でテクスチャと剛性を解読できることを発見しました。
「生体工学的な指の神経支配に関するほとんどの既存の研究は、指先の表面にセンサーを設置することを提案しました」とチェンは言いました。 「これらの研究は有望な結果をもたらしましたが、指先センサーと物体の間の正確な接触が必要であり、実際には保証できないことがよくあります。 私たちの研究の重要な利点は、感知ユニットが腱上にあることです。したがって、指のどこからでも接触すると、特徴的な信号出力が得られ、触覚情報を推測するために利用できます。」
この研究チームによって導入された新しい触覚センシング方法は、ロボットの腱へのセンサーの埋め込みに基づいています。これは、これまでテストされたことのないアプローチであり、非常に有望であることがわかりました。 将来的には、彼らが開発したシステムを使用して、表面との完全または正確な接触を必要とせずに、触覚および固有受容感覚のフィードバックを収集できる、より高度なロボットおよび義手を開発することができます。
「現在、このシステムの滑り検出機能を調査しています」とチェン氏は述べています。 「私たち人間が物を操作したりつかんだりするとき、滑りはほとんど避けられません。したがって、滑りの検出と制御は、堅牢で信頼性の高い制御にとって非常に重要です。 したがって、滑り検出は追加するのに適した機能であると信じており、予備実験では非常に有望な結果が示されました。」
彼らのシステムをさらに開発することに加えて、研究者たちは低コストの触覚の開発に関して有名なナノテクノロジー研究所と協力しています センサー 力/トルク信号を感知でき、ロボットの指先に配置できます。 彼らはすでにこのデバイスのいくつかのプロトタイプを作成し、現在そのパフォーマンスを評価しています。



