
Ces dernières années, de nombreux roboticiens du monde entier ont essayé de développer des systèmes robotiques capables de reproduire artificiellement le sens du toucher humain. En outre, ils ont essayé de créer des membres bioniques et des robots humanoïdes de plus en plus réalistes et avancés, en utilisant des matériaux souples au lieu de structures rigides.
Malgré leurs avantages liés à la texture, les mains robotiques faites de matériaux souples sont souvent incapables de collecter un large éventail d'informations sensorielles. En fait, reproduire les mécanismes biologiques complexes qui permettent aux humains de recueillir des informations tactiles sur les objets s'est avéré être très difficile jusqu'à présent.



Des chercheurs de l'Université Beihang à Pékin ont récemment développé une nouvelle technique de détection tactile qui pourrait être appliquée aux doigts robotiques faits de matériaux mous. Ce mécanisme, introduit, a été inspiré par la proprioception, le mécanisme biologique qui permet aux mammifères de percevoir ou d'être conscient de la position et des mouvements de leur corps.
"L'idée derrière nos recherches récentes est basée sur le cadre de proprioception trouvé chez l'homme, qui détermine la position de notre corps et la charge sur nos tendons/articulations", a déclaré Chang Cheng, l'un des chercheurs qui a mené l'étude, à TechXplore. « Pensez au fait que lorsque vous mettez un bandeau sur les yeux et que vous vous couvrez les oreilles, vous pouvez toujours sentir la posture de votre main, la position de vos bras ou le poids d'un sac d'épicerie ; cette capacité est connue sous le nom de proprioception. Nous avons travaillé sur un projet de recherche sur la main prothétique et nous cherchons des moyens de remédier au manque de rétroaction sensorielle dans les mains prothétiques existantes.
Dans le passé, les chercheurs en robotique ne corrélaient généralement pas la proprioception avec le sens du toucher. En fait, le mécanisme humain de la proprioception ne permet pas de réponses particulièrement précises, ce qui explique probablement pourquoi les humains ne l'utilisent pas pour reconnaître la texture des objets ou des surfaces.
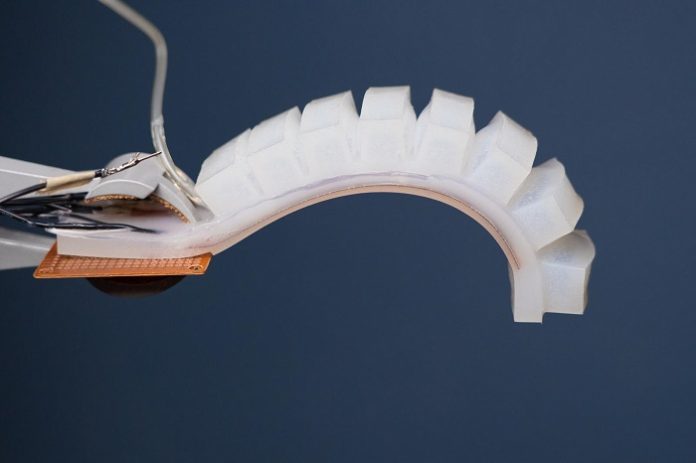
Comme les capteurs industriels sont beaucoup plus sensibles que les propriocepteurs humains, cependant, les appliquer à des doigts robotiques pourrait aider les chercheurs à recueillir un retour sensoriel tactile plus précis. Le système prototype créé par Cheng et ses collègues est composé d'un actionneur linéaire, d'un tendon (ou câble), d'une contrainte capteur et un doigt robotique doux introduit dans l'un de leurs articles précédents.
"Le tendon relie le doigt à l'actionneur et le capteur de contrainte est installé au milieu du tendon", a déclaré Cheng. « Lorsque l'actionneur est entraîné, il tire le tendon, ce qui fait que le doigt se plie/se redresse, et la tension sur le tendon change en conséquence. Lorsque le doigt touche différents objets, le capteur émet une série de signaux de contrainte qui caractérisent les objets touchés.
Essentiellement, la technique conçue par les chercheurs extrait des caractéristiques de la lecture du capteur. Par la suite, il utilise des outils d'apprentissage automatique pour déchiffrer la texture et la rigidité de la surface ou de l'objet que le doigt robotique touche.
Cheng et ses collègues ont évalué leur technique de détection tactile en effectuant une série de tests à l'aide du système prototype qu'ils ont créé. Ils ont découvert que leur technique pouvait déchiffrer la texture et la rigidité avec des niveaux de précision élevés (100 % et 99.7 %, respectivement).
"La plupart des recherches existantes sur l'innervation des doigts bioniques ont proposé l'installation de capteurs sur la surface du bout des doigts", a déclaré Cheng. « Bien que ces études aient donné des résultats prometteurs, elles nécessitent des contacts exacts entre les capteurs du bout des doigts et les objets, ce qui souvent ne peut pas être assuré dans la pratique. Un avantage clé de notre étude est que l'unité de détection est sur le tendon, donc le contact de n'importe où sur le doigt entraînera une sortie de signal caractérisée, qui peut être utilisée pour déduire des informations tactiles.
La nouvelle méthode de détection tactile introduite par cette équipe de chercheurs est basée sur l'implantation de capteurs sur un tendon robotique, une approche qui n'avait jamais été testée auparavant et qui s'est avérée très prometteuse. À l'avenir, le système qu'ils ont développé pourrait être utilisé pour développer des robots plus avancés et des prothèses de mains capables de recueillir des informations tactiles et proprioceptives sans nécessiter un contact parfait ou exact avec une surface.
"Nous explorons maintenant les capacités de détection de glissement de ce système", a déclaré Cheng. « Lorsque nous, les humains, manipulons ou saisissons des choses, le glissement est presque inévitable. Par conséquent, la détection et le contrôle du glissement sont essentiels à des contrôles robustes et fiables. Nous pensons donc que la détection de glissement serait une fonctionnalité intéressante à ajouter, et nos expériences préliminaires ont montré des résultats vraiment prometteurs. »
En plus de développer davantage leur système, les chercheurs collaborent avec un laboratoire de nanotechnologie de renom au développement d'un système tactile à faible coût capteur qui peut détecter les signaux de force/couple et pourrait être placé sur le bout des doigts du robot. Ils ont déjà créé quelques prototypes de cet appareil et évaluent maintenant ses performances.



