
Son yıllarda dünya çapında çok sayıda robot bilimci, insanın dokunma duyusunu yapay olarak kopyalayabilen robotik sistemler geliştirmeye çalışıyor. Ayrıca sert yapılar yerine yumuşak malzemeler kullanarak giderek daha gerçekçi ve gelişmiş biyonik uzuvlar ve insansı robotlar yaratmaya çalışıyorlar.
Dokuyla ilgili avantajlarına rağmen, yumuşak malzemelerden yapılmış robotik eller genellikle çok çeşitli duyusal bilgileri toplayamıyor. Aslına bakılırsa, insanların nesneler hakkında dokunsal bilgi toplamasına olanak tanıyan karmaşık biyolojik mekanizmaları kopyalamanın şu ana kadar oldukça zorlu olduğu kanıtlandı.



Pekin'deki Beihang Üniversitesi'ndeki araştırmacılar yakın zamanda yumuşak malzemelerden yapılmış robotik parmaklara uygulanabilecek yeni bir dokunsal algılama tekniği geliştirdiler. Tanıtılan bu mekanizma, memelilerin vücutlarının konumunu ve hareketlerini algılamasını veya bunların farkında olmasını sağlayan biyolojik mekanizma olan propriyosepsiyondan esinlenmiştir.
Araştırmayı yürüten araştırmacılardan biri olan Chang Cheng, TechXplore'a şunları söyledi: "Son araştırmamızın ardındaki fikir, insanlarda bulunan ve vücut pozisyonumuzu ve tendonlarımız/eklemlerimiz üzerindeki yükü belirleyen propriyosepsiyon çerçevesine dayanıyor." “Gözlerinizi bağlayıp kulaklarınızı kapattığınızda, el duruşunuzu, kol pozisyonunuzu veya bir alışveriş çantasının ne kadar ağır olduğunu hâlâ hissedebildiğinizi düşünün; bu yeteneğe propriyosepsiyon denir. Protez el araştırma projesi üzerinde çalışıyoruz ve mevcut protez ellerdeki duyusal geri bildirim eksikliğini gidermenin yollarını arıyoruz."
Geçmişte, robot bilimi araştırmacıları tipik olarak propriyosepsiyon ile dokunma duyusu arasında bağlantı kurmuyordu. Aslında insanın propriyosepsiyon mekanizması özellikle kesin tepkilere izin vermez, bu da muhtemelen insanların bunu nesnelerin veya yüzeylerin dokusunu tanımak için kullanmamasının nedenidir.
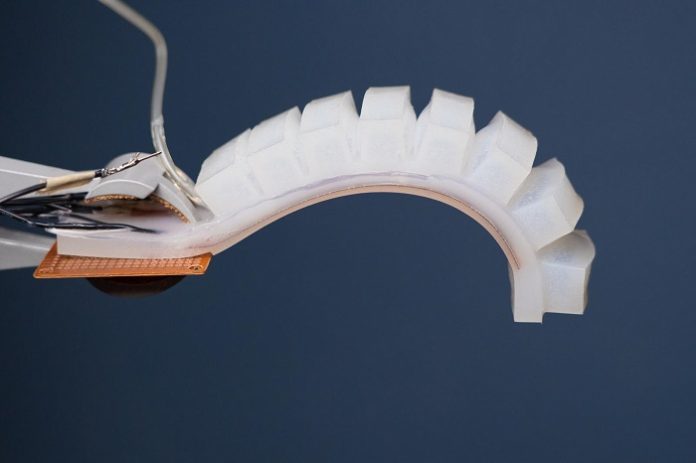
Endüstriyel sensörler insan proprioseptörlerinden çok daha hassas olduğundan, bunların robotik parmaklara uygulanması araştırmacıların daha hassas dokunsal duyusal geri bildirim toplamasına yardımcı olabilir. Cheng ve meslektaşları tarafından oluşturulan prototip sistem, doğrusal bir aktüatör, bir tendon (veya kablo), bir gerilimden oluşuyor. algılayıcı ve önceki makalelerinden birinde tanıtılan yumuşak robotik parmak.
Cheng, "Tendon, parmağı aktüatöre bağlıyor ve gerilim sensörü tendonun ortasına monte ediliyor" dedi. "Aktüatör çalıştırıldığında tendonu çekiyor, bu da parmağın bükülmesine/düzeltilmesine neden oluyor ve tendon üzerindeki gerilim de buna göre değişiyor. Parmak farklı nesnelere dokunduğunda sensör, dokunulan nesneleri karakterize eden bir dizi gerilim sinyali üretecektir."
Araştırmacılar tarafından geliştirilen teknik, esasen sensörün okumasından özellikler çıkarıyor. Daha sonra robotik parmağın dokunduğu yüzeyin veya nesnenin dokusunu ve sertliğini çözmek için makine öğrenme araçlarını kullanıyor.
Cheng ve meslektaşları, oluşturdukları prototip sistemi kullanarak bir dizi test gerçekleştirerek dokunsal algılama tekniklerini değerlendirdiler. Tekniklerinin doku ve sertliği yüksek düzeyde doğrulukla (sırasıyla %100 ve %99.7) çözebildiğini buldular.
Cheng, "Biyonik parmaklara zarar veren biyonik parmaklarla ilgili mevcut araştırmaların çoğu, parmak ucu yüzeyine sensörlerin yerleştirilmesini önerdi" dedi. "Bu çalışmalar umut verici sonuçlar vermiş olsa da, parmak ucu sensörleri ile nesneler arasında tam temas gerektiriyor ve bu da çoğu zaman pratikte sağlanamıyor. Çalışmamızın önemli bir avantajı, algılama ünitesinin tendonun üzerinde olması, dolayısıyla parmağın herhangi bir yerinden temasın, dokunsal bilgileri çıkarmak için kullanılabilecek karakteristik bir sinyal çıkışıyla sonuçlanmasıdır."
Bu araştırmacı ekibi tarafından tanıtılan yeni dokunsal algılama yöntemi, sensörlerin robotik bir tendona yerleştirilmesine dayanıyor; bu, daha önce hiç test edilmemiş ve son derece umut verici bulduğu bir yaklaşım. Gelecekte geliştirdikleri sistem, bir yüzeyle mükemmel veya tam temas gerektirmeden dokunsal ve propriyoseptif geri bildirim toplayabilen daha gelişmiş robotlar ve protez eller geliştirmek için kullanılabilir.
Cheng, "Şu anda bu sistemin kayma tespit yeteneklerini araştırıyoruz" dedi. "Biz insanlar bir şeyleri manipüle ettiğimizde veya kavradığımızda kayma neredeyse kaçınılmazdır, bu nedenle kaymanın tespiti ve kontrolü sağlam ve güvenilir kontroller için çok önemlidir. Bu nedenle, kayma tespitinin eklenebilecek güzel bir özellik olacağına inanıyoruz ve ön deneylerimiz gerçekten umut verici sonuçlar verdi."
Araştırmacılar, sistemlerini daha da geliştirmenin yanı sıra, düşük maliyetli dokunsal bir sensör geliştirmek için ünlü bir nanoteknoloji laboratuvarıyla da işbirliği yapıyor. algılayıcı kuvvet/tork sinyallerini algılayabilen ve robotik parmak uçlarına yerleştirilebilen. Zaten bu cihazın birkaç prototipini oluşturdular ve şimdi performansını değerlendiriyorlar.



