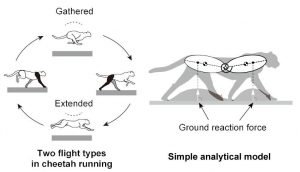

„Der ausgedehnte Flug ermöglicht es Geparden, auf hohe Geschwindigkeiten zu beschleunigen, und er hängt davon ab, dass die Bodenreaktionskräfte bestimmte Bedingungen erfüllen. Bei Pferden fehlt der verlängerte Flug“, so das Nagoya Institute of Technologie.
Es ist auch bekannt, dass eine beträchtliche Beugung der Wirbelsäule beteiligt ist, die für die beiden Flugperioden in entgegengesetzte Richtungen gebogen wird.
„Aufgrund dieser komplexen und hybriden Dynamik können uns Beobachtungen jedoch nur so weit bringen, die der Laufdynamik von Tieren zugrunde liegenden Mechanismen zu enträtseln“, sagte Nagoya-Forscher Tomoya Kamimura.
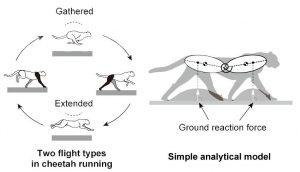
Das zweidimensionale Modell hat Bodenreaktionskräfte und einen "Gepard", der aus zwei starren Körpern besteht, die für die Wirbelsäule aneinander angelenkt und gefedert sind, und zwei masselose Stangen für die gepaarten Vorder- und Hinterbeine. Vom Wirbelsäulenscharnier aus sind Vorder- und Hinterteil symmetrisch.
Das Lösen von Bewegungsgleichungen für das Modell ergab sechs mögliche periodische Lösungen: zwei davon mit ausgedehntem und gesammeltem Flug und vier mit nur der einen oder der anderen.


Von den beiden hatte einer von ihnen Vorder- und Hintergliedkontakt in der gleichen Reihenfolge wie ein echter Gepard, und seine Dynamik war gut mit realen Tiermessungen vergleichbar – und einer der ausrangierten vier scheint mit galoppierenden Pferden zu übereinstimmen.
„Während der Mechanismus, der diesem Unterschied der Flugarten zwischen Tierarten zugrunde liegt, noch unklar ist, erweitern unsere Ergebnisse das Verständnis der dynamischen Mechanismen, die der schnellen Fortbewegung bei Geparden zugrunde liegen“, sagte Kamimura. „Außerdem können sie in Zukunft auf das mechanische und steuerungstechnische Design von Robotern mit Beinen angewendet werden.“
Die Arbeit wird in 'Dynamische Determinanten, die zwei verschiedene Flugarten im Gepardengalopp ermöglichen, um die Geschwindigkeit durch Wirbelsäulenbewegungen zu erhöhen' in Scientific Reports beschrieben.
Dieses übersichtliche Papier ist in voller Höhe ohne Bezahlung erhältlich. Für die weniger mathematischen Neigungen scrollen Sie über die Mitte hinaus zu „Verschiedene Flugtypen ermöglichen schnelle Fortbewegung“ gegen Ende und zu den Schlussfolgerungen.