
"Bunlardan uzun süreli uçuş, çitaların yüksek hızlara çıkmasını sağlayan şeydir ve belirli koşulları karşılayan yer reaksiyon kuvvetlerine bağlıdır. Nagoya Enstitüsü'ne göre, atlar söz konusu olduğunda uzun uçuş söz konusu değildir." Teknoloji.
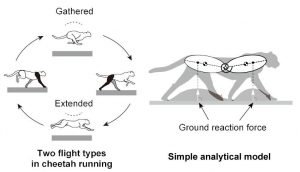
Ayrıca iki uçuş periyodu boyunca omurganın zıt yönlerde bükülmesiyle önemli miktarda omurga esnemesinin söz konusu olduğu da bilinmektedir.
Ancak Nagoya araştırmacısı Tomoya Kamimura, "Böylesine karmaşık ve hibrit dinamikler nedeniyle, gözlemler bizi hayvanların koşma dinamiklerinin altında yatan mekanizmaları çözmede ancak bir yere kadar götürebilir" dedi.
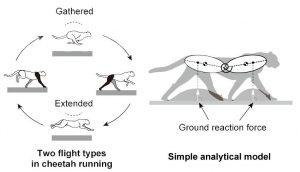
İki boyutlu model, yer reaksiyon kuvvetlerine ve omurga için birbirine menteşelenmiş ve yaylanmış iki sert gövdeden yapılmış bir 'çita'ya ve eşleştirilmiş ön ve eşleştirilmiş arka bacaklar için iki kütlesiz bara sahiptir. Omurga menteşesinden itibaren ön ve arka kısımlar simetriktir.
Model için hareket denklemlerinin çözülmesi altı olası periyodik çözüm üretti: bunlardan ikisi hem uzatılmış hem de toplanmış uçuşu içeriyor ve dördü yalnızca birini veya diğerini içeriyor.


İkisinden birinin ön ve arka bacak teması gerçek bir Çita ile aynı sıradaydı ve dinamikleri gerçek hayattaki hayvan ölçümleriyle karşılaştırıldığında iyi durumdaydı ve atılan dört kişiden biri dörtnala koşan atlarla eşleşiyor gibi görünüyor.
Kamimura, "Hayvan türleri arasındaki uçuş türleri arasındaki bu farklılığın altında yatan mekanizma hala belirsizliğini korurken, bulgularımız çitalarda yüksek hızlı hareketin altında yatan dinamik mekanizmaların anlaşılmasını genişletiyor" dedi. "Ayrıca gelecekte bacaklı robotların mekanik ve kontrol tasarımına da uygulanabilirler."
Çalışma, Bilimsel Raporlarda 'Çita dörtnalasında iki farklı uçuş tipinin omurga hareketi yoluyla hızı artırmak için etkinleştirilmesini sağlayan dinamik belirleyiciler' bölümünde anlatılıyor.
Açıkça yazılmış bu makalenin tamamı ücretsiz olarak mevcuttur. Matematiğe daha az eğilimli olanlar için, ortayı geçerek 'Farklı uçuş türleri yüksek hızlı hareketi mümkün kılar' kısmına doğru ilerleyerek sonuna ve sonuçlara doğru ilerleyin.