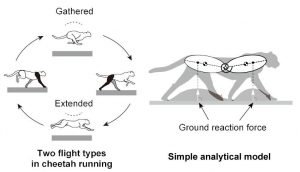

“ในจำนวนนี้ การบินระยะไกลคือสิ่งที่ช่วยให้เสือชีต้าเร่งความเร็วได้ด้วยความเร็วสูง และขึ้นอยู่กับแรงปฏิกิริยาภาคพื้นดินที่เป็นไปตามเงื่อนไขเฉพาะ ในกรณีของม้า จะไม่มีการบินระยะยาว” ตามรายงานของสถาบันนาโกย่า เทคโนโลยี.
เป็นที่ทราบกันดีว่ามีการงอกระดูกสันหลังมาก โดยจะงอไปในทิศทางตรงกันข้ามสำหรับช่วงเวลาการบินทั้งสองช่วง
อย่างไรก็ตาม “เนื่องจากไดนามิกที่ซับซ้อนและสลับซับซ้อนเช่นนี้ การสังเกตการณ์จึงสามารถช่วยให้เราเข้าใจถึงกลไกที่อยู่เบื้องหลังการเคลื่อนที่ของสัตว์เท่านั้น” โทโมยะ คามิมูระ นักวิจัยจากนาโกย่ากล่าว
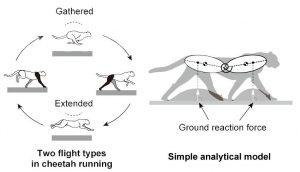
โมเดลสองมิติมีแรงปฏิกิริยาบนพื้น และ 'เสือชีตาห์' ที่สร้างขึ้นจากร่างที่แข็งแรงสองร่างซึ่งพับแล้วเด้งเข้าหากันสำหรับกระดูกสันหลัง และแท่งเหล็กไร้มวลสองอันสำหรับขาหน้าและขาหลังคู่ จากบานพับกระดูกสันหลัง ส่วนหน้าและส่วนหลังมีความสมมาตร
การแก้สมการการเคลื่อนที่สำหรับแบบจำลองทำให้เกิดคำตอบคาบที่เป็นไปได้หกข้อ: สองวิธีรวมทั้งเที่ยวบินแบบขยายและแบบรวม และสี่แบบที่มีเพียงหนึ่งหรืออย่างอื่นเท่านั้น


ในจำนวนนี้ หนึ่งในนั้นมีการสัมผัสของแขนขาหน้าและขาหลังในลำดับเดียวกันกับเสือชีตาห์จริง และพลวัตของมันนั้นเทียบได้กับขนาดสัตว์ในชีวิตจริง และหนึ่งในสี่ตัวที่ถูกทิ้งนั้นดูเหมือนจะเข้ากับม้าควบ
"ในขณะที่กลไกที่เป็นรากฐานของความแตกต่างในประเภทการบินระหว่างสัตว์แต่ละชนิดยังคงไม่ชัดเจน การค้นพบของเราขยายความเข้าใจเกี่ยวกับกลไกแบบไดนามิกที่อยู่เบื้องหลังการเคลื่อนที่ด้วยความเร็วสูงของเสือชีตาห์" คามิมูระกล่าว “นอกจากนี้ ยังสามารถนำไปใช้กับการออกแบบกลไกและการควบคุมของหุ่นยนต์แบบมีขาได้ในอนาคต”
งานนี้ได้อธิบายไว้ใน 'Dynamical Determinants ทำให้สามารถบินได้สองประเภทในการควบเสือชีตาห์เพื่อเพิ่มความเร็วผ่านการเคลื่อนไหวของกระดูกสันหลัง' ใน รายงานทางวิทยาศาสตร์
กระดาษเขียนชัดเจนนี้สามารถใช้ได้เต็มจำนวนโดยไม่ต้องชำระเงิน สำหรับผู้ที่มีความโน้มเอียงทางคณิตศาสตร์น้อยกว่า ให้เลื่อนผ่านตรงกลางไปที่ 'ประเภทการบินที่แตกต่างกันเปิดใช้งานการเคลื่อนไหวความเร็วสูง' ไปจนสุดและไปยังข้อสรุป