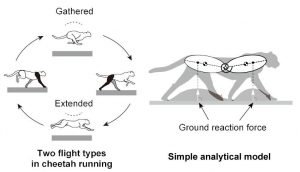

«Из них именно длительный полет позволяет гепардам разгоняться до высоких скоростей, и это зависит от сил реакции земли, удовлетворяющих конкретным условиям. У лошадей расширенный полет отсутствует», — по данным Нагойского института Технологии.
Также известно, что это связано со значительным сгибанием позвоночника, при котором он сгибается в противоположных направлениях в течение двух периодов полета.
Однако, «из-за такой сложной и гибридной динамики, наблюдения могут только увести нас в разгадку механизмов, лежащих в основе динамики бега животных», - сказал исследователь из Нагои Томоя Камимура.
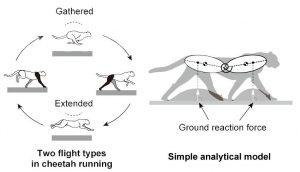
Двухмерная модель имеет силы реакции опоры и «гепарда», построенного из двух твердых тел, шарнирно соединенных и подпружиненных друг к другу для позвоночника, и двух безмассовых стержней для парных передних и парных задних ног. От шарнира позвоночника передняя и задняя части симметричны.
Решение уравнений движения для модели дало шесть возможных периодических решений: два из них, включая как расширенный, так и собранный полет, и четыре только с одним или другим.


Из двух, у одного из них был контакт передних и задних конечностей в том же порядке, что и у настоящего гепарда, и его динамика хорошо сравнивалась с измерениями реальных животных - и один из четырех выброшенных, похоже, соответствует скачущим лошадям.
«Хотя механизм, лежащий в основе этой разницы в типах полета между видами животных, все еще остается неясным, наши результаты расширяют понимание динамических механизмов, лежащих в основе высокоскоростного передвижения гепардов», - сказал Камимура. «Кроме того, в будущем они могут быть применены к механической конструкции и конструкции управления роботами на ногах».
Работа описана в разделе «Динамические детерминанты, позволяющие два разных типа полета гепарда галопом увеличивать скорость за счет движения позвоночника» в Scientific Reports.
Эта четко написанная статья доступна полностью без оплаты. Для менее склонных к математике прокрутите середину до пункта «Различные типы полета, обеспечивающие высокоскоростное передвижение» ближе к концу и к выводам.