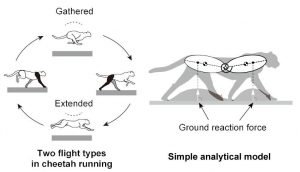

“Dari jumlah tersebut, penerbangan yang diperpanjang memungkinkan cheetah berakselerasi hingga kecepatan tinggi, dan hal ini bergantung pada gaya reaksi darat yang memenuhi kondisi tertentu. Dalam kasus kuda, penerbangan yang diperpanjang tidak ada,” menurut Nagoya Institute of Teknologi.
Juga diketahui bahwa pelenturan tulang belakang yang cukup besar terlibat, dengan itu membungkuk ke arah yang berlawanan untuk dua periode penerbangan.
Namun, “Karena dinamika hibrida dan kompleks seperti itu, pengamatan hanya dapat membawa kita sejauh ini dalam mengungkap mekanisme yang mendasari dinamika berjalan hewan” kata peneliti Nagoya Tomoya Kamimura.
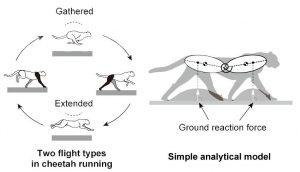
Model dua dimensi memiliki gaya reaksi tanah dan 'cheetah' yang dibangun dari dua badan kaku yang berengsel dan berayun satu sama lain untuk tulang belakang, dan dua batang tanpa massa untuk sepasang kaki depan dan belakang yang berpasangan. Dari engsel tulang belakang, bagian depan dan belakang simetris.
Memecahkan persamaan gerak untuk model menghasilkan enam kemungkinan solusi periodik: dua di antaranya termasuk penerbangan yang diperpanjang dan berkumpul, dan empat dengan hanya satu atau yang lain.


Dari keduanya, salah satunya memiliki kontak tungkai depan dan belakang dalam urutan yang sama seperti Cheetah asli, dan dinamikanya dibandingkan dengan pengukuran hewan di kehidupan nyata – dan salah satu dari empat yang dibuang tampaknya cocok dengan kuda yang berlari kencang.
“Sementara mekanisme yang mendasari perbedaan jenis penerbangan antara spesies hewan ini masih belum jelas, temuan kami memperluas pemahaman tentang mekanisme dinamis yang mendasari penggerak berkecepatan tinggi pada cheetah,” kata Kamimura. “Selanjutnya, mereka dapat diterapkan pada desain mekanik dan kontrol robot berkaki di masa depan.”
Pekerjaan ini dijelaskan dalam 'Penentu dinamis yang memungkinkan dua jenis penerbangan berbeda pada cheetah berpacu untuk meningkatkan kecepatan melalui gerakan tulang belakang' di Scientific Reports.
Kertas yang ditulis dengan jelas ini tersedia secara penuh tanpa pembayaran. Untuk yang kurang cenderung secara matematis, gulir melewati bagian tengah ke 'Jenis penerbangan yang berbeda memungkinkan penggerak berkecepatan tinggi' menjelang akhir, dan ke kesimpulan.