
“Di questi, il volo prolungato è ciò che consente ai ghepardi di accelerare a velocità elevate e dipende dalle forze di reazione del suolo che soddisfano condizioni specifiche. Nel caso dei cavalli, il volo prolungato è assente”, secondo il Nagoya Institute of Tecnologia.
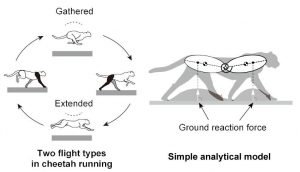
È anche noto che si tratta di una notevole flessione della colonna vertebrale, con la stessa piegata in direzioni opposte per i due periodi di volo.
Tuttavia, "A causa di dinamiche così complesse e ibride, le osservazioni possono solo portarci così lontano nel svelare i meccanismi alla base delle dinamiche di corsa degli animali", ha affermato il ricercatore di Nagoya Tomoya Kamimura.
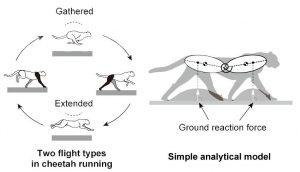
Il modello bidimensionale ha forze di reazione al suolo e un "ghepardo" costituito da due corpi rigidi incernierati e sospesi l'uno all'altro per la colonna vertebrale e due barre senza massa per le zampe anteriori e posteriori. Dalla cerniera della colonna vertebrale, le parti anteriore e posteriore sono simmetriche.
Risolvere le equazioni del moto per il modello ha prodotto sei possibili soluzioni periodiche: due di esse includevano sia il volo esteso che quello raccolto, e quattro solo l'una o l'altra.


Dei due, uno di loro ha avuto il contatto degli arti anteriori e posteriori nello stesso ordine di un vero ghepardo, e le sue dinamiche si sono confrontate bene con le misurazioni di animali reali - e uno dei quattro scartati sembra corrispondere a cavalli al galoppo.
"Anche se il meccanismo alla base di questa differenza nei tipi di volo tra le specie animali rimane ancora poco chiaro, i nostri risultati estendono la comprensione dei meccanismi dinamici alla base della locomozione ad alta velocità nei ghepardi", ha affermato Kamimura. "Inoltre, possono essere applicati alla progettazione meccanica e di controllo dei robot con gambe in futuro".
Il lavoro è descritto in "Determinanti dinamici che consentono due diversi tipi di volo nel galoppo del ghepardo per aumentare la velocità attraverso il movimento della colonna vertebrale" in Scientific Reports.
Questo documento scritto in modo chiaro è disponibile per intero senza pagamento. Per i meno inclini alla matematica, scorrere oltre la metà fino a "Diversi tipi di volo consentono la locomozione ad alta velocità" verso la fine e alle conclusioni.