
「このうち、チーターが高速に加速できるのは長時間の飛行であり、それは特定の条件を満たす地面反力に依存します。 馬の場合、延長飛行はありません」と名古屋医学研究所は述べています。 テクノロジー.
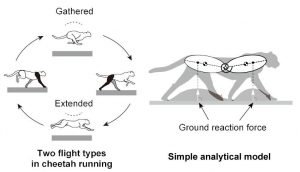
また、脊椎のかなりの屈曲が関与していることも知られており、XNUMX 回の飛行期間で逆方向に屈曲します。
しかし、「このように複雑でハイブリッドなダイナミクスのため、動物の走行ダイナミクスの根底にあるメカニズムを解明するには、これまでの観察しかできません」と名古屋の研究者上村知也氏は述べています。
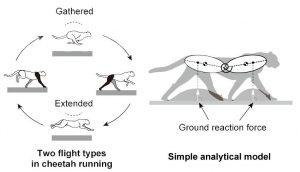
この XNUMX 次元モデルには、地面の反力と、脊椎用に互いにヒンジとバネで接続された XNUMX つの剛体から構築された「チーター」、および対になった前脚と対になった後脚用の XNUMX つの質量のないバーがあります。 背骨のヒンジから前後左右対称。
モデルの運動方程式を解くと、XNUMX つの可能な周期解が生成されました。そのうちの XNUMX つは拡張飛行と集合飛行の両方を含み、XNUMX つはいずれか一方のみを含みます。


XNUMX頭のうちXNUMX頭は、本物のチーターと同じ順序で前肢と後肢が接触しており、そのダイナミクスは実際の動物の測定値とよく比較され、破棄されたXNUMX頭のうちXNUMX頭は疾走する馬と一致しているようです.
「動物種間の飛行タイプのこの違いの根底にあるメカニズムはまだ不明ですが、私たちの発見は、チーターの高速移動の根底にある動的メカニズムの理解を広げます」と神村は言いました. 「さらに、将来的には脚式ロボットの機械設計や制御設計にも応用できるでしょう」
この研究は、Scientific Reports の「XNUMX 種類のチーター ギャロップの飛行を可能にし、脊椎の動きによって速度を向上させる動的決定要因」で説明されています。
この明確に書かれた紙は、支払いなしで完全に入手できます。 数学的にあまり傾いていない人は、真ん中を越えてスクロールし、「異なる飛行タイプにより高速移動が可能」を最後に、そして結論までスクロールします。