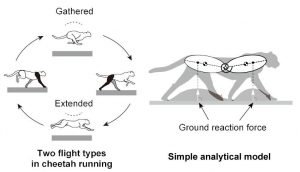

“De ellos, el vuelo prolongado es lo que permite a los guepardos acelerar a altas velocidades, y depende de que las fuerzas de reacción del suelo satisfagan condiciones específicas. En el caso de los caballos, el vuelo prolongado está ausente”, según el Instituto de Nagoya de Tecnología.
También se sabe que se trata de una considerable flexión de la columna, que se dobla en direcciones opuestas durante los dos períodos de vuelo.
Sin embargo, "debido a una dinámica tan compleja e híbrida, las observaciones solo pueden llevarnos hasta cierto punto en lo que respecta a desentrañar los mecanismos subyacentes a la dinámica de carrera de los animales", dijo el investigador de Nagoya, Tomoya Kamimura.
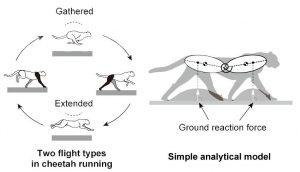
El modelo bidimensional tiene fuerzas de reacción del suelo y un 'guepardo' construido a partir de dos cuerpos rígidos articulados y suspendidos entre sí para la columna vertebral, y dos barras sin masa para las patas delanteras y traseras emparejadas. Desde la bisagra del lomo, las partes delantera y trasera son simétricas.
La resolución de ecuaciones de movimiento para el modelo produjo seis posibles soluciones periódicas: dos de ellas incluyen vuelo extendido y acumulado, y cuatro con solo una u otra.


De los dos, uno de ellos tuvo contacto con las extremidades delanteras y traseras en el mismo orden que un guepardo real, y su dinámica se comparó bien con las mediciones de animales de la vida real, y uno de los cuatro descartados parece coincidir con los caballos al galope.
"Si bien el mecanismo subyacente a esta diferencia en los tipos de vuelo entre las especies animales aún no está claro, nuestros hallazgos amplían la comprensión de los mecanismos dinámicos que subyacen a la locomoción de alta velocidad en los guepardos", dijo Kamimura. “Además, se pueden aplicar al diseño mecánico y de control de robots con patas en el futuro”.
El trabajo se describe en 'Determinantes dinámicos que permiten dos tipos diferentes de vuelo en el galope de un guepardo para mejorar la velocidad a través del movimiento de la columna' en Scientific Reports.
Este documento escrito con claridad está disponible en su totalidad sin pago. Para los menos inclinados a las matemáticas, desplácese más allá del medio hasta 'Los diferentes tipos de vuelo permiten la locomoción a alta velocidad' hacia el final y hasta las conclusiones.