
“Hiervan is het de langere vlucht die cheeta’s in staat stelt om tot hoge snelheden te accelereren, en dit hangt af van de reactiekrachten op de grond die aan specifieke omstandigheden voldoen. In het geval van paarden ontbreekt de verlengde vlucht”, aldus het Nagoya Institute of Technologie.
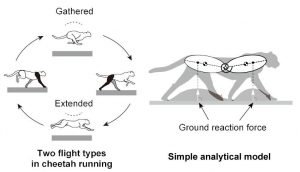
Het is ook bekend dat er sprake is van een aanzienlijke buiging van de wervelkolom, waarbij deze gedurende de twee vluchtperioden in tegengestelde richtingen wordt gebogen.
"Vanwege deze complexe en hybride dynamiek kunnen waarnemingen ons echter slechts tot nu toe helpen bij het ontrafelen van de mechanismen die ten grondslag liggen aan de loopdynamiek van dieren", zegt Nagoya-onderzoeker Tomoya Kamimura.
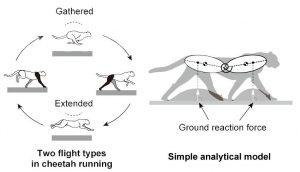
Het tweedimensionale model heeft grondreactiekrachten en een 'cheetah' die is opgebouwd uit twee stijve lichamen die scharnieren en aan elkaar zijn geveerd voor de wervelkolom, en twee massaloze staven voor de gepaarde voor- en achterpoten. Vanaf het wervelkolomscharnier zijn voor- en achterdelen symmetrisch.
Het oplossen van bewegingsvergelijkingen voor het model leverde zes mogelijke periodieke oplossingen op: twee met zowel verlengde als verzamelde vlucht, en vier met slechts de een of de ander.


Van de twee had een van hen contact met voor- en achterpoten in dezelfde volgorde als een echte cheetah, en de dynamiek ervan was goed te vergelijken met echte dierenmetingen - en een van de weggegooide vier lijkt overeen te komen met galopperende paarden.
"Hoewel het mechanisme dat ten grondslag ligt aan dit verschil in vluchttypes tussen diersoorten nog steeds onduidelijk is, vergroten onze bevindingen het begrip van de dynamische mechanismen die ten grondslag liggen aan snelle voortbeweging bij cheeta's," zei Kamimura. "Bovendien kunnen ze in de toekomst worden toegepast op het mechanische en besturingsontwerp van pootrobots."
Het werk wordt beschreven in 'Dynamische determinanten die twee verschillende soorten vluchten in cheetagalop mogelijk maken om de snelheid door beweging van de wervelkolom te vergroten' in Scientific Reports.
Dit duidelijk geschreven papier is volledig zonder betaling verkrijgbaar. Voor de minder wiskundig ingestelde, scroll voorbij het midden naar 'Verschillende vluchttypes maken snelle voortbeweging mogelijk' naar het einde toe, en naar de conclusies.