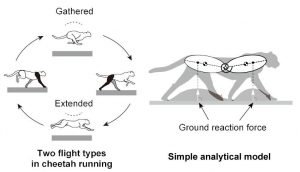

“Destes, o voo prolongado é o que permite às chitas acelerar a altas velocidades e depende das forças de reação do solo que satisfazem condições específicas. No caso dos cavalos, o voo prolongado está ausente”, segundo o Instituto de Pesquisa de Nagoya. Equipar.
Sabe-se também que há considerável flexão da coluna vertebral, com ela dobrada em direções opostas durante os dois períodos de voo.
No entanto, “devido a essa dinâmica complexa e híbrida, as observações só podem nos levar a desvendar os mecanismos subjacentes à dinâmica de corrida dos animais”, disse o pesquisador de Nagoya Tomoya Kamimura.
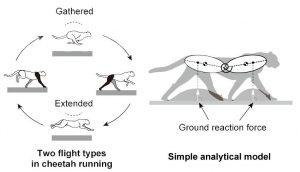
O modelo bidimensional tem forças de reação do solo e uma 'chita' construída a partir de dois corpos rígidos articulados e suspensos um para o outro para a coluna vertebral e duas barras sem massa para as pernas dianteiras e traseiras emparelhadas. Da dobradiça da coluna vertebral, as partes frontal e traseira são simétricas.
Resolver equações de movimento para o modelo produziu seis soluções periódicas possíveis: duas delas incluindo o vôo estendido e recolhido, e quatro com apenas um ou o outro.


Dos dois, um deles teve contato com os membros anteriores e posteriores na mesma ordem que um Cheetah real, e sua dinâmica se compara bem com as medições de animais da vida real - e um dos quatro descartados parece corresponder a cavalos a galope.
“Embora o mecanismo subjacente a essa diferença nos tipos de voo entre as espécies animais ainda permaneça obscuro, nossos resultados estendem a compreensão dos mecanismos dinâmicos subjacentes à locomoção de alta velocidade em chitas”, disse Kamimura. “Além disso, eles podem ser aplicados ao projeto mecânico e de controle de robôs com pernas no futuro.”
O trabalho é descrito em 'Determinantes dinâmicos que permitem dois tipos diferentes de voo no galope de chita para aumentar a velocidade por meio do movimento da coluna' em Relatórios Científicos.
Este artigo escrito de forma clara está disponível na íntegra sem pagamento. Para os menos inclinados à matemática, vá além do meio para 'Diferentes tipos de voo permitem locomoção em alta velocidade' até o final e para as conclusões.