
« Parmi ceux-ci, le vol prolongé est ce qui permet aux guépards d’accélérer à des vitesses élevées, et cela dépend des forces de réaction au sol satisfaisant des conditions spécifiques. Dans le cas des chevaux, le vol prolongé est absent », selon l'Institut de Nagoya. Technologie.
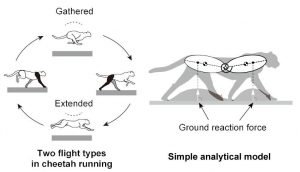
Il est également connu qu'une flexion considérable de la colonne vertébrale est impliquée, avec une flexion dans des directions opposées pour les deux périodes de vol.
Cependant, "En raison de ces dynamiques complexes et hybrides, les observations ne peuvent pas nous aider à élucider les mécanismes sous-jacents à la dynamique de course des animaux", a déclaré Tomoya Kamimura, chercheur à Nagoya.
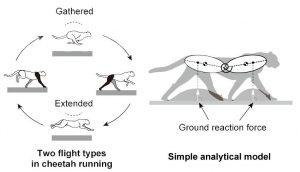
Le modèle bidimensionnel a des forces de réaction au sol et un «guépard» construit à partir de deux corps rigides articulés et suspendus l'un à l'autre pour la colonne vertébrale, et deux barres sans masse pour les pattes avant et arrière jumelées. À partir de la charnière de la colonne vertébrale, les parties avant et arrière sont symétriques.
La résolution des équations du mouvement pour le modèle a produit six solutions périodiques possibles : deux d'entre elles comprenant à la fois le vol étendu et rassemblé, et quatre avec seulement l'une ou l'autre.


Sur les deux, l'un d'entre eux avait un contact avec les membres antérieurs et postérieurs dans le même ordre qu'un vrai guépard, et sa dynamique se comparait bien avec les mesures d'animaux réels - et l'un des quatre abandonnés semble correspondre à des chevaux au galop.
"Bien que le mécanisme sous-jacent à cette différence dans les types de vol entre les espèces animales reste encore incertain, nos résultats étendent la compréhension des mécanismes dynamiques sous-jacents à la locomotion à grande vitesse chez les guépards", a déclaré Kamimura. "En outre, ils peuvent être appliqués à la conception mécanique et de contrôle des robots à pattes à l'avenir."
Le travail est décrit dans « Déterminants dynamiques permettant à deux types de vol différents au galop de guépards d'améliorer la vitesse grâce au mouvement de la colonne vertébrale » dans Scientific Reports.
Ce document clairement rédigé est disponible dans son intégralité sans paiement. Pour les moins enclins aux mathématiques, faites défiler le milieu jusqu'à « Différents types de vol permettent une locomotion à grande vitesse » vers la fin et jusqu'aux conclusions.