
“이 중 장시간 비행은 치타가 고속으로 가속할 수 있게 해주는 요소이며, 이는 특정 조건을 충족하는 지상 반력에 달려 있습니다. 말의 경우 연장 비행이 불가능하다”고 나고야 기술연구소는 밝혔다. Technology.
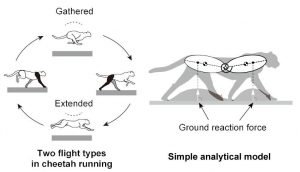
또한 두 번의 비행 기간 동안 척추가 반대 방향으로 구부러지는 등 상당한 척추 굴곡이 관련되어 있는 것으로 알려져 있습니다.
그러나 나고야 연구원 카미무라 토모야(Tomoya Kamimura)는 “그러한 복잡하고 혼합된 역학으로 인해 관찰을 통해서는 동물의 달리기 역학에 기초한 메커니즘을 지금까지만 밝혀낼 수 있을 뿐입니다.”라고 말했습니다.
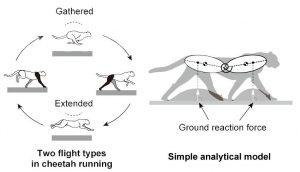
XNUMX차원 모델에는 지면 반력과 척추를 위해 서로 경첩 및 스프링으로 연결된 두 개의 강체로 구성된 '치타'와 한 쌍의 앞다리와 한 쌍의 뒷다리를 위한 두 개의 질량이 없는 막대가 있습니다. 척추 경첩부터 앞부분과 뒷부분이 대칭입니다.
모델의 운동 방정식을 풀면 XNUMX개의 가능한 주기적 솔루션이 생성됩니다. 그 중 XNUMX개는 확장 및 집합 비행을 포함하고 XNUMX개는 둘 중 하나만 포함합니다.


둘 중 하나는 실제 치타와 동일한 순서로 앞다리와 뒷다리 접촉을 가졌으며 그 역학은 실제 동물 측정과 잘 비교되었으며 버려진 XNUMX개 중 하나는 질주하는 말과 일치하는 것으로 보입니다.
Kamimura는 “동물 종 간 비행 유형의 차이를 뒷받침하는 메커니즘은 여전히 불분명하지만, 우리의 발견은 치타의 고속 이동의 기본이 되는 동적 메커니즘에 대한 이해를 확장합니다.”라고 Kamimura는 말했습니다. "게다가 향후 다리가 있는 로봇의 기계 및 제어 설계에도 적용될 수 있습니다."
이 작업은 Scientific Reports의 '척추 움직임을 통해 속도를 향상시키기 위해 치타 질주에서 두 가지 다른 유형의 비행을 가능하게 하는 동적 결정 요인'에 설명되어 있습니다.
명확하게 작성된 이 논문은 비용 지불 없이 전체 내용을 사용할 수 있습니다. 수학적으로 덜 기울어진 경우 중간을 지나서 '다양한 비행 유형으로 인해 고속 이동이 가능합니다' 끝까지 스크롤하여 결론으로 이동하세요.