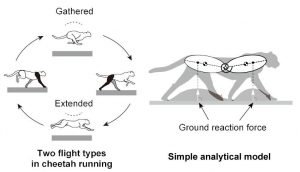

“Daripada jumlah ini, penerbangan lanjutan adalah yang membolehkan cheetah memecut ke kelajuan tinggi, dan ia bergantung kepada daya tindak balas tanah yang memenuhi syarat tertentu. Dalam kes kuda, penerbangan lanjutan tidak hadir,” menurut Institut Nagoya Teknologi.
Telah diketahui juga bahawa lenturan tulang belakang cukup besar, dengan bengkok ke arah yang berlawanan untuk dua tempoh penerbangan.
Namun, "Oleh kerana dinamika kompleks dan hibrida, pengamatan hanya dapat membuat kita sejauh ini dalam mengungkap mekanisme yang mendasari dinamika berjalan haiwan" kata penyelidik Nagoya, Tomoya Kamimura.
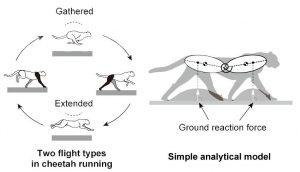
Model dua dimensi mempunyai daya tindak balas tanah dan 'cheetah' yang dibina dari dua badan tegar yang berengsel dan saling melambung untuk tulang belakang, dan dua batang tanpa jisim untuk bahagian depan berpasangan dan kaki belakang berpasangan. Dari engsel tulang belakang, bahagian depan dan belakang simetri.
Menyelesaikan persamaan gerakan untuk model menghasilkan enam kemungkinan penyelesaian berkala: dua daripadanya termasuk kedua-dua penerbangan yang dilanjutkan dan dikumpulkan, dan empat dengan hanya satu atau yang lain.


Dari keduanya, salah satu dari mereka mempunyai kontak anggota badan depan dan belakang dalam urutan yang sama dengan Cheetah yang nyata, dan dinamika dibandingkan dengan pengukuran haiwan kehidupan sebenar - dan salah satu dari empat yang dibuang itu nampaknya sesuai dengan kuda yang berlari.
"Walaupun mekanisme yang mendasari perbezaan jenis penerbangan antara spesies haiwan masih belum jelas, penemuan kami memperluas pemahaman mengenai mekanisme dinamik yang mendasari pergerakan berkelajuan tinggi pada cheetah," kata Kamimura. "Selanjutnya, mereka dapat diterapkan pada desain mekanik dan kontrol robot berkaki di masa depan."
Karya ini dijelaskan dalam 'Penentu dinamik yang memungkinkan dua jenis penerbangan berlari di cheetah untuk meningkatkan kelajuan melalui pergerakan tulang belakang' dalam Laporan Ilmiah.
Kertas yang ditulis dengan jelas ini boleh didapati sepenuhnya tanpa bayaran. Untuk yang kurang cenderung secara matematik, tatal melewati tengah ke 'Jenis penerbangan yang berbeza membolehkan pergerakan berkelajuan tinggi' menjelang akhir, dan kesimpulan.