مهندسون في معهد كاليفورنيا تكنولوجيا (Caltech) ابتكرت روبوتًا يمشي جزئيًا وجزءًا بدون طيار يُقال إنه يمكنه أداء مهام الحركة المعقدة بما يتجاوز "المشي والطيران البسيط". يمكن للروبوت LEONARDO (Legs ONboARD drOne، أو LEO) ذو القدمين المشي على حبل مشدود والقفز وركوب لوح التزلج بالإضافة إلى الطيران بفضل منصته الروبوتية متعددة الوسائط.
قال الباحثون إنه من خلال الاستفادة من قدرة الحركة الهجينة هذه ، يمكن أن يفتح الباب أمام مجموعة من التطبيقات التي يصعب على الروبوتات الأرضية أو الجوية ، مثل مهام الفحص أو الإصلاح أو الاستبدال متعددة النقاط في المواقع التي يصعب على البشر الوصول إليها. بالإضافة إلى قيادة تطوير أنظمة معدات الهبوط التكيفية المكونة من مفاصل أرجل محكومة للروبوتات الجوية وغيرها من المركبات الطائرة.
قال الباحثون إن المنصة ، التي تجمع بين أنظمة الحركة الطائرة والمشي باستخدام التحكم المتزامن للدوافع الكهربائية الموزعة وزوج من الأرجل متعددة المفاصل ، تمكن من الحركات المعقدة ، مثل المشي على الحبل المشدود أو التزلج ، والتي تمثل تحديًا للروبوتات الموجودة على قدمين. .


مناورات حركة المدار الأرضي المنخفض. انقر للحصول على صورة أكبر. (المصدر: معهد كاليفورنيا للتكنولوجيا)
تم تطويره بواسطة فريق في مركز Caltech للأنظمة والتقنيات المستقلة (CAST) ، ويقال إن LEO هو أول روبوت يستخدم أرجل متعددة المفاصل ودوافع قائمة على المروحة لتحقيق تحكم دقيق في توازنه. تم الإبلاغ عن البحث في ورقة بحثية نُشرت على الإنترنت في Science Robotics.
يوضح LEONARDO حركات المشي مع مناورات الطيران للتغلب على العقبات باستخدام التحكم المتزامن في المراوح ومفاصل الساق ، والتي يمكن أن تمكن من المهام والعمليات الروبوتية غير الممكنة للروبوتات أحادية الحركة ، وفقًا لورقة البحث. وهذا يعني أن الروبوتات ذات الحركة المتعددة الوسائط تنتقل بين وضعي المشي والطيران حسب الحاجة.
علق الباحثون في الورقة: "بالمقارنة مع الروبوت الأرضي ، يمكن أن يتغلب المدار الأرضي المنخفض على أي عقبة باستخدام الانتقال بين وضعي الأرض والطيران أو الوصول بسهولة إلى موقع مرتفع باستخدام المراوح". "بالإضافة إلى ذلك ، في حين أن الروبوت الجوي يمكن أن يحوم فوق الأهداف ، يمكن أن يستخدم المدار الأرضي المنخفض حركته الأرضية للاقتراب منها لفحصها عن كثب. عندما يكون المدار الأرضي المنخفض على اتصال بالأرض أو يمشي ، يمكنه أيضًا رفض الاضطرابات الكبيرة ومنع السقوط حتى على الأسطح الزلقة للغاية باستخدام التحكم المتزامن في مراوحه الموزعة ومفاصل الأرجل ، مما يسمح بحركة سير أكثر قوة ودقة. "
التفاصيل هنا. يبلغ ارتفاع المدار الأرضي المنخفض 75 سم عند المشي ويزن 2.58 كجم. يتكون من ثلاثة أنظمة فرعية رئيسية: الجذع ، ونظام الدفع المروحة ، ورجلين بأقدام نقطية (انظر الصورة أدناه). يمكن أن تعمل بشكل مستقل بفضل أجهزة الكمبيوتر وأجهزة الاستشعار الموجودة على متنها. تبلغ سرعة المشي الاسمية 20 سم / ثانية ، على الرغم من أن الباحثين قالوا إن سرعته الأرضية يمكن أن تزيد بشكل كبير باستخدام الطيران المتقطع أثناء الاقتراب من الأرض.

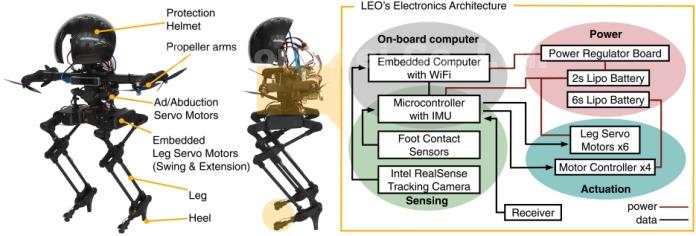
التسمية التوضيحية: المكونات الإلكترونية والميكانيكية الرئيسية لـ LEO. انقر للحصول على صورة أكبر. (المصدر: معهد كاليفورنيا للتكنولوجيا)
تحتوي كل ساق على ثلاثة محركات مؤازرة (محركات DC بدون فرش) للتشغيل: أحدهما يحرك هيكل الساق ، بينما يقوم المحركان المؤازران الآخران بقيادة آلية الساق المتوازية. تشتمل محركات BLDC على علب تروس عالية التخفيض وتحكم مدمج في الموضع. وفقًا للباحثين ، "تتميز وحدة التحكم في الموضع بأنها دقيقة وسريعة بما يكفي للتحكم في ساق المدار الأرضي المنخفض بسبب القصور الذاتي المنخفض للساقين والنطاق الترددي العالي لوحدة التحكم في المروحة التي تعمل على استقرار مشية المشي".
يستخدم المدار الأرضي المنخفض أيضًا أربعة مراوح موضوعة بشكل متماثل عند أكتافه لتحقيق الاستقرار والتحكم في مناورات المشي والطيران. "يتم تحديد محاور الدوران للدوران لتمكين توليد لحظات الالتفاف ، والانحراف ، والانعراج في كل من الاتجاهات الإيجابية والسلبية حول مركز الكتلة (CoM) للطيران وحول موقع قدم الموقف الحالي للمشي ،" وفقًا لـ ورق.
يحتوي الجذع ، الذي يربط الذراعين والساقين في مجموعة واحدة ، على جهازي كمبيوتر على متن الطائرة ، وأجهزة استشعار متعددة ، وبطاريتين من الليثيوم بوليمر (LiPo) لتشغيل النظام. يتفاعل كمبيوتر واحد مع المستشعرات ، ويتلقى الأوامر ، ويقدر الحالات بناءً على قراءات أجهزة الاستشعار ، ويحسب المسارات. الكمبيوتر الثاني ، الذي يدير وحدات التحكم في الطيران والمشي والارتفاع ، يتفاعل مباشرة مع مشغلات الساق ووحدة التحكم في محرك المروحة بالإضافة إلى وحدة القياس بالقصور الذاتي (IMU) للحصول على معلومات الموقف منخفض الكمون.

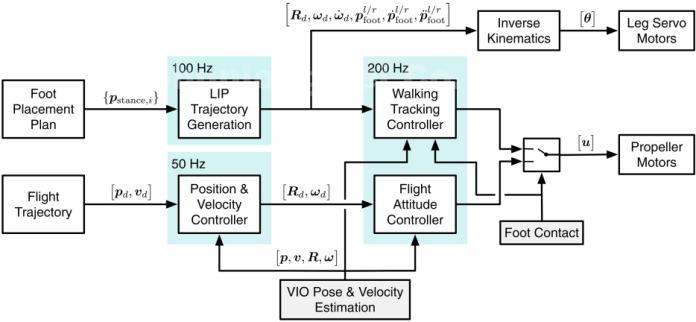
التسمية التوضيحية: هندسة التحكم في المدار الأرضي المنخفض. انقر للحصول على صورة أكبر. (المصدر: معهد كاليفورنيا للتكنولوجيا)
أجرى فريق Caltech عددًا من الاختبارات في كل من الهواء الطلق والداخل. تضمنت هذه الاختبارات المشي على أرض مستوية ، والطيران المتزامن والمشي ، والمشي والتوازن على حبل مشدود ، وركوب لوح تزلج حول أقماع المرور باستخدام دفع مراوحها.
أفاد معهد كاليفورنيا للتكنولوجيا أن الباحثين يخططون لإنشاء تصميم أكثر صلابة للساق يمكنه دعم المزيد من وزن الروبوت وزيادة قوة الدفع للمراوح وكذلك جعل الروبوت أكثر استقلالية. كما يخططون لإضافة خوارزمية مطورة حديثًا للتحكم في هبوط الطائرات بدون طيار والتي تستخدم الشبكات العصبية العميقة التي ستساعد المدار الأرضي المنخفض على فهم البيئة بشكل أفضل لاتخاذ قراراتها الخاصة بشأن أفضل مزيج من المشي أو الطيران أو الحركة الهجينة.
ومن بين المؤلفين المشاركين في البحث ، سون جو تشونج ، أستاذ برين للفضاء والتحكم والأنظمة الديناميكية. كيونام كيم ، باحثة ما بعد الدكتوراه في معهد كاليفورنيا للتكنولوجيا ؛ باتريك سبيلر ، عضو سابق في مجموعة تشونغ ويعمل حاليًا مع مختبر الدفع النفاث ، الذي يديره معهد كاليفورنيا للتكنولوجيا في وكالة ناسا ؛ Elena-Sorina Lupu (MS '21) ، طالبة دراسات عليا في Caltech ، وعلي رضا رامزاني ، باحث سابق لما بعد الدكتوراه في معهد كاليفورنيا للتكنولوجيا ويعمل حاليًا أستاذًا مساعدًا في جامعة نورث إيسترن. تم دعم هذا البحث من قبل صندوق Caltech Gary Clinard للابتكار ومركز Caltech للأنظمة والتقنيات المستقلة.