Ingenieure am California Institute of Technologie (Caltech) haben einen teils gehenden Roboter und teils fliegende Drohne entwickelt, der Berichten zufolge komplexe Fortbewegungsaufgaben ausführen kann, die über „einfaches Gehen und Fliegen“ hinausgehen. Der zweibeinige Roboter LEONARDO (Legs ONboARD drOne oder LEO) kann dank seiner multimodalen Fortbewegungsroboterplattform auf einer Slackline gehen, hüpfen und Skateboard fahren sowie fliegen.
Durch die Nutzung dieser hybriden Fortbewegungsfähigkeit, so die Forscher, könnte sie die Tür zu einer Reihe von Anwendungen öffnen, die für Boden- oder Flugroboter schwierig sind, wie z sowie die Entwicklung adaptiver Fahrwerkssysteme mit gesteuerten Beingelenken für Flugroboter und andere fliegende Fahrzeuge voranzutreiben.
Die Forscher sagten, dass die Plattform, die fliegende und gehende Fortbewegungsregime unter Verwendung einer synchronisierten Steuerung von verteilten elektrischen Triebwerken und einem Paar mehrgelenkiger Beine kombiniert, die komplexen Bewegungen wie das Gehen auf einer Slackline oder das Skateboarden ermöglicht, die für bestehende zweibeinige Roboter eine Herausforderung darstellen .


Die Fortbewegungsmanöver von LEO. Klicken Sie für ein größeres Bild. (Quelle: Caltech)
LEO wurde von einem Team des Caltech Center for Autonomous Systems and Technologies (CAST) entwickelt und soll der erste Roboter sein, der Mehrgelenkbeine und Propeller-basierte Triebwerke verwendet, um eine präzise Kontrolle über seine Balance zu erreichen. Über die Forschung wurde in einem online bei Science Robotics veröffentlichten Artikel berichtet.
LEONARDO demonstriert Gehbewegungen mit Flugmanövern zur Überwindung von Hindernissen unter Verwendung einer synchronisierten Steuerung von Propellern und Beingelenken, die potenziell Robotermissionen und -operationen ermöglichen könnten, die für monomodale Fortbewegungsroboter nicht möglich sind, so das Forschungspapier. Das bedeutet, dass Roboter mit multimodaler Fortbewegung je nach Bedarf zwischen Lauf- und Flugmodus wechseln.
„Im Vergleich zu einem Bodenroboter kann LEO jedes Hindernis durch den Übergang zwischen Boden- und Flugmodus überwinden oder mithilfe von Propellern leicht einen erhöhten Ort erreichen“, kommentieren die Forscher in dem Papier. „Außerdem kann LEO, während ein Flugroboter über Zielen schweben kann, seine Bodenbewegung nutzen, um sich ihnen zur genaueren Untersuchung zu nähern. Wenn LEO Bodenkontakt hat oder geht, kann es auch auf extrem rutschigen Oberflächen durch synchronisierte Steuerung seiner verteilten Propeller und Beingelenke große Störungen abweisen und ein Stürzen verhindern, wodurch eine robustere und präzisere Gehbewegung ermöglicht wird.“
Hier sind die Details. LEO ist beim Gehen 75 cm groß und wiegt 2.58 kg. Es besteht aus drei Hauptsubsystemen: einem Torso, einem Propellerantriebssystem und zwei Beinen mit spitzen Füßen (siehe Bild unten). Es kann dank seiner Bordcomputer und Sensoren autonom arbeiten. Die nominelle Gehgeschwindigkeit beträgt 20 cm/s. Die Geschwindigkeit über Grund kann jedoch durch intermittierendes Fliegen in Bodennähe deutlich erhöht werden.

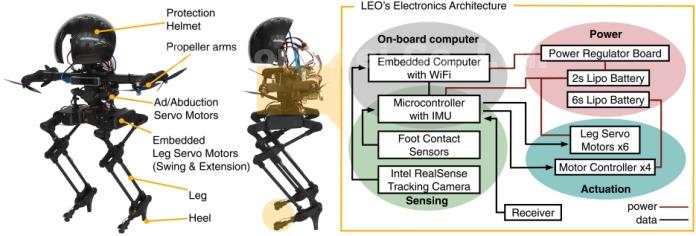
Bildunterschrift: Die wichtigsten elektronischen und mechanischen Komponenten von LEO. Klicken Sie für ein größeres Bild. (Quelle: Caltech)
Jedes Bein hat drei Servomotoren (bürstenlose Gleichstrommotoren) zur Betätigung: Einer bewegt die Beinstruktur, während die anderen beiden Servoaktuatoren den parallelen Beinmechanismus antreiben. Die BLDC-Motoren verfügen über ein Getriebe mit hoher Untersetzung und eine integrierte Positionsregelung. „Der eingebettete Positionsregler ist aufgrund der geringen Trägheit der Beine und der hohen Bandbreite des Propellerreglers, der den Gehgang stabilisiert, präzise und schnell genug für die Beinkontrolle von LEO“, so die Forscher.
LEO verwendet außerdem vier symmetrisch angeordnete Propeller an seinen Schultern zur Stabilisierung und Kontrolle der Geh- und Flugmanöver. „Die Rotationsachsen des Propellers sind so gewählt, dass beim Fliegen Roll-, Nick- und Giermomente sowohl in positiver als auch in negativer Richtung um den Schwerpunkt (CoM) und beim Gehen um die aktuelle Standfußposition erzeugt werden können“, so die Papier.
Der Torso, der die Arme und Beine zu einer Baugruppe verbindet, beherbergt zwei Bordcomputer, mehrere Sensoren und zwei Lithium-Polymer-Batterien (LiPo) zur Stromversorgung des Systems. Ein Computer verbindet sich mit den Sensoren, empfängt Befehle, schätzt Zustände basierend auf den Sensormesswerten und berechnet die Trajektorien. Der zweite Computer, der die Lauf- und Höhenflugsteuerung steuert, ist direkt mit den Beinaktuatoren und der Propellermotorsteuerung sowie einer Trägheitsmesseinheit (IMU) für Fluglageinformationen mit geringer Latenz verbunden.

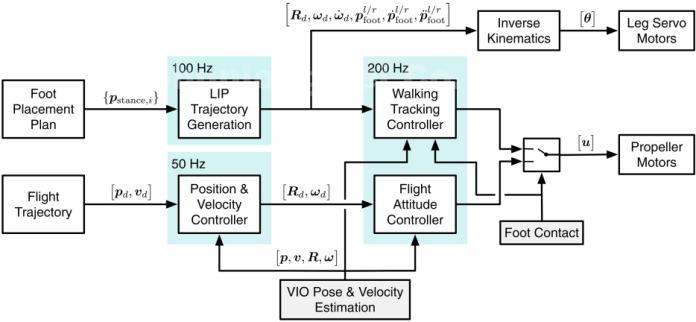
Bildunterschrift: Steuerungsarchitektur von LEO. Klicken Sie für ein größeres Bild. (Quelle: Caltech)
Das Caltech-Team führte eine Reihe von Tests sowohl im Freien als auch in Innenräumen durch. Zu diesen Tests gehörten das Gehen auf flachem Gelände, das synchronisierte Fliegen und Gehen, das Gehen und Balancieren auf einem schlaffen Seil und das Fahren eines Skateboards um Leitkegel mit dem Schub seiner Propeller.
Caltech berichtete, dass die Forscher planen, ein steiferes Beindesign zu entwickeln, das mehr vom Gewicht des Roboters tragen und die Schubkraft der Propeller erhöhen sowie den Roboter autonomer machen kann. Sie planen auch, einen neu entwickelten Drohnenlandesteuerungsalgorithmus hinzuzufügen, der tiefe neuronale Netze verwendet, die LEO helfen werden, die Umgebung besser zu verstehen, um eigene Entscheidungen über die beste Kombination aus Gehen, Fliegen oder Hybridbewegung zu treffen.
Co-Autoren des Papiers sind Soon-Jo Chung, Bren-Professor für Luft- und Raumfahrt und Steuerung und dynamische Systeme; Kyunam Kim, Postdoc am Caltech; Patrick Spieler, ein ehemaliges Mitglied von Chungs Gruppe, der derzeit beim Jet Propulsion Laboratory arbeitet, das von Caltech für die NASA geleitet wird; Elena-Sorina Lupu (MS '21), Doktorandin am Caltech, und Alireza Ramezani, ehemalige Caltech-Postdoktorandin und derzeit Assistenzprofessorin an der Northeastern University. Diese Forschung wurde vom Caltech Gary Clinard Innovation Fund und dem Caltech Center for Autonomous Systems and Technologies unterstützt.